
Hi,
ich möchte euch gerne mein neues Projekt den 190mm Midget Frame näher vorstellen. Begonnen habe ich mit dem Bau bereits im März, daher fasse ich die Schritte ein wenig zusammen.
21.03.2015 - Schritt 1 - Teileliste
Die letzten Teile für das neue Projekt sind eingetroffen. Der Frame namens Midget wurde von binolein designed und ich habe einen der ersten bekommen. Vielen Dank dafür an Thorsten! Diesmal wird es ein reiner Sportcopter mit Flip32+ FC und keinem zusätzlichen Schnickschnack. Leds zur besseren Orientierung werden aber sicherlich verbaut. Den Frame sowie alle Ersatzteile zum Frame könnt ihr im Shop vom smartshapes kaufen. Zudem soll es auch eine 220mm Version des Frames geben.
Meine Teileliste:
• Midget Frame 190mm
• 1806/2300kv DYS BlackEdition
• 4in1 10a SimonK ESC
• Flip32+ Flight Controller (baugleich zum Naze32)
• Antennenhalter von Pepe/Kaischu aus dem Forum
• HQ5030 Props


Der Frame wiegt 70g und alle notwendigen Schrauben zum Aufbau sind mit dabei. Auch das Landegestell, integriert in die Motorarme finde ich sehr gelungen und bietet genug Platz den Flugakku untendrunter zu montieren.
08.04.2015 - Schritt 2 - Flip32+ Setup
Heute Abend habe ich das Flip32+ in Betrieb genommen und mit der aktuellen Firmware von Cleanflight geflasht. Ich hätte auch Baseflight nutzen können, finde aber Cleanflight von dem was ich gelesen habe ein bisschen besser. Beide Versionen sind eine Weiterentwicklung vom MultiWii-Code und für 32Bit Prozessoren gedacht.
Das Flip32+ 10DOF habe ich bei Banggood bestellt und nach dem Verbinden mit dem PC erstmal den UART Treiber installieren müssen. Diesen könnt ihr euch direkt bei silabs herunterladen! Anschließend öffnet ihr den Gerätemanager und wählt das Gerät mit dem Ausrufezeichen aus. Mit einem Rechtsklick auf das Gerät könnt ihr die Treiber aktualisieren und dort wählt ihr dann den zuvor entpackten Treiberordner aus. Jetzt wird der Treiber installiert. Danach muss noch die Baudrate auf 115700 eingestellt werden, das ist wichtig für die Kommunikation mit der GUI.


Nun kann die GUI in den Google Chrome Erweiterungen heruntergeladen und installiert werden. Nach der Installation einfach die Cleanflight GUI öffnen und auf Firmware-Updater klicken. Dort als Board das Naze32 auswählen und die aktuelle Firmware flashen. Geht wirklich alles sehr leicht und ist im Vergleich zur Installation alter MultWii Software per Arduino ein Kinderspiel.


Zuerst habe ich wie immer den ACC und MAG kalibriert. Das geht ganz leicht und im beigefügten Bild steht eine kleine Anleitung hinter den jeweiligen Tasten für calibrate ACC und MAG. Im Anschluss habe ich unter Configuration noch den Mixer auf QuadX gestellt und das Receiver-Signal, in meinem Fall, PWM ausgewählt. Motor_Stop habe ich auch gleich aktiviert, da ich es besser finde, wenn die Motoren nach dem armen nicht laufen. Unter dem Punkt Modes wurden dann noch die Flugmodi eingestellt, aber auch das geht sehr leicht und ist schön übersichtlich gestaltet.
13.04.2015 - Schritt3 - Zusammenbau
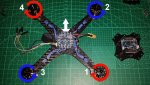
Die Motorregler wurden angelernt und in dem Zuge auch gleich die Drehrichtungen getestet. Für einen X-Copter mit Flip32+ habe ich euch im Anschluss die Drehrichtung eingezeichnet.
Nach dem das Verlöten und Einkürzen der Kabel erledigt war, konnte die Centerplatte mit Flip32+ Board montiert werden. Was ich an dem 4in1 Regler wirklich gut finde, sind die wenigen und leichten Kabel. Es ist wie immer nur einmal Strom für den Empfänger notwendig und ansonsten werden lediglich die Signalleitungen weitergeleitet. Hier spart man sich also einen Arbeitsschritt im Gegensatz zu normalen Reglern, zwecks Einkürzung der Kabel. Dazu kommt das geringe Gesamtgewicht mit 11g und die kompakte Bauweise des 4in1 Simonk Reglers. Der Frame könnte aber auch mit normalen Reglern, auf den Motorarmen platziert, aufgebaut werden.




Für den Midget nutze ich einen X660 Full Range DSM2 Empfänger mit 6 Kanälen. Dieser reicht für den Kleinen vollkommen aus, da er ein reiner Sportcopter sein soll, der auf Sicht geflogen wird. Heute werde ich noch die Kabel vom Empfänger zum Board einkürzen, so dass ein ordentlicher Gesamteindruck entsteht und in der GUI die letzten Einstellungen vornehmen. Wie ich den Empfänger per PWM verbunden habe, könnt ihr im Bild mit dem Pinlayout des Flip32+ sehen. Über den Pinreihen auf dem Flip32+ Board ist jeweils ein V für VCC und G für GND aufgedruckt. Die letzte und damit innen liegende Reihe ist die Signalleitung und mit einer Zahl darüber gekennzeichnet.

Auf der Taranis habe ich es mir leicht gemacht, einfach ein vorhandenes Copterprofil mit MultiWii kopiert und für das Flip32+ mit Cleanflight angepasst. Da sich die beiden Systeme sehr ähneln, sind die Einstellungen schnell erledigt. Sobald ich alles fertig eingestellt habe, werde ich auch die Modelldatei für die Taranis hochladen.
Damit ist der Aufbau abgeschlossen und dem ersten Testflug steht nichts mehr im Weg. Ich komme auf sehr gutes Gesamtgewicht von 219g ohne Akku. Der kleine sollte also einen ordentlichen Schub entwickeln. Vielen Dank nochmal an Thorsten, für den Mini Speed-Frame!") Ich finde ihn optisch mit dem blauen Akzenten eigentlich sehr gelungen. Was sagt ihr?
Ich finde ihn optisch mit dem blauen Akzenten eigentlich sehr gelungen. Was sagt ihr?


19.04.2015 - Schritt4 - Testflug
Testflug und die passenden PIDs finden..
Gruß
Jan
ich möchte euch gerne mein neues Projekt den 190mm Midget Frame näher vorstellen. Begonnen habe ich mit dem Bau bereits im März, daher fasse ich die Schritte ein wenig zusammen.
21.03.2015 - Schritt 1 - Teileliste
Die letzten Teile für das neue Projekt sind eingetroffen. Der Frame namens Midget wurde von binolein designed und ich habe einen der ersten bekommen. Vielen Dank dafür an Thorsten! Diesmal wird es ein reiner Sportcopter mit Flip32+ FC und keinem zusätzlichen Schnickschnack. Leds zur besseren Orientierung werden aber sicherlich verbaut. Den Frame sowie alle Ersatzteile zum Frame könnt ihr im Shop vom smartshapes kaufen. Zudem soll es auch eine 220mm Version des Frames geben.
Meine Teileliste:
• Midget Frame 190mm
• 1806/2300kv DYS BlackEdition
• 4in1 10a SimonK ESC
• Flip32+ Flight Controller (baugleich zum Naze32)
• Antennenhalter von Pepe/Kaischu aus dem Forum
• HQ5030 Props
Der Frame wiegt 70g und alle notwendigen Schrauben zum Aufbau sind mit dabei. Auch das Landegestell, integriert in die Motorarme finde ich sehr gelungen und bietet genug Platz den Flugakku untendrunter zu montieren.
08.04.2015 - Schritt 2 - Flip32+ Setup
Heute Abend habe ich das Flip32+ in Betrieb genommen und mit der aktuellen Firmware von Cleanflight geflasht. Ich hätte auch Baseflight nutzen können, finde aber Cleanflight von dem was ich gelesen habe ein bisschen besser. Beide Versionen sind eine Weiterentwicklung vom MultiWii-Code und für 32Bit Prozessoren gedacht.
Das Flip32+ 10DOF habe ich bei Banggood bestellt und nach dem Verbinden mit dem PC erstmal den UART Treiber installieren müssen. Diesen könnt ihr euch direkt bei silabs herunterladen! Anschließend öffnet ihr den Gerätemanager und wählt das Gerät mit dem Ausrufezeichen aus. Mit einem Rechtsklick auf das Gerät könnt ihr die Treiber aktualisieren und dort wählt ihr dann den zuvor entpackten Treiberordner aus. Jetzt wird der Treiber installiert. Danach muss noch die Baudrate auf 115700 eingestellt werden, das ist wichtig für die Kommunikation mit der GUI.
Nun kann die GUI in den Google Chrome Erweiterungen heruntergeladen und installiert werden. Nach der Installation einfach die Cleanflight GUI öffnen und auf Firmware-Updater klicken. Dort als Board das Naze32 auswählen und die aktuelle Firmware flashen. Geht wirklich alles sehr leicht und ist im Vergleich zur Installation alter MultWii Software per Arduino ein Kinderspiel.
Zuerst habe ich wie immer den ACC und MAG kalibriert. Das geht ganz leicht und im beigefügten Bild steht eine kleine Anleitung hinter den jeweiligen Tasten für calibrate ACC und MAG. Im Anschluss habe ich unter Configuration noch den Mixer auf QuadX gestellt und das Receiver-Signal, in meinem Fall, PWM ausgewählt. Motor_Stop habe ich auch gleich aktiviert, da ich es besser finde, wenn die Motoren nach dem armen nicht laufen. Unter dem Punkt Modes wurden dann noch die Flugmodi eingestellt, aber auch das geht sehr leicht und ist schön übersichtlich gestaltet.
13.04.2015 - Schritt3 - Zusammenbau
Die Motorregler wurden angelernt und in dem Zuge auch gleich die Drehrichtungen getestet. Für einen X-Copter mit Flip32+ habe ich euch im Anschluss die Drehrichtung eingezeichnet.
Nach dem das Verlöten und Einkürzen der Kabel erledigt war, konnte die Centerplatte mit Flip32+ Board montiert werden. Was ich an dem 4in1 Regler wirklich gut finde, sind die wenigen und leichten Kabel. Es ist wie immer nur einmal Strom für den Empfänger notwendig und ansonsten werden lediglich die Signalleitungen weitergeleitet. Hier spart man sich also einen Arbeitsschritt im Gegensatz zu normalen Reglern, zwecks Einkürzung der Kabel. Dazu kommt das geringe Gesamtgewicht mit 11g und die kompakte Bauweise des 4in1 Simonk Reglers. Der Frame könnte aber auch mit normalen Reglern, auf den Motorarmen platziert, aufgebaut werden.
Für den Midget nutze ich einen X660 Full Range DSM2 Empfänger mit 6 Kanälen. Dieser reicht für den Kleinen vollkommen aus, da er ein reiner Sportcopter sein soll, der auf Sicht geflogen wird. Heute werde ich noch die Kabel vom Empfänger zum Board einkürzen, so dass ein ordentlicher Gesamteindruck entsteht und in der GUI die letzten Einstellungen vornehmen. Wie ich den Empfänger per PWM verbunden habe, könnt ihr im Bild mit dem Pinlayout des Flip32+ sehen. Über den Pinreihen auf dem Flip32+ Board ist jeweils ein V für VCC und G für GND aufgedruckt. Die letzte und damit innen liegende Reihe ist die Signalleitung und mit einer Zahl darüber gekennzeichnet.
Auf der Taranis habe ich es mir leicht gemacht, einfach ein vorhandenes Copterprofil mit MultiWii kopiert und für das Flip32+ mit Cleanflight angepasst. Da sich die beiden Systeme sehr ähneln, sind die Einstellungen schnell erledigt. Sobald ich alles fertig eingestellt habe, werde ich auch die Modelldatei für die Taranis hochladen.
Damit ist der Aufbau abgeschlossen und dem ersten Testflug steht nichts mehr im Weg. Ich komme auf sehr gutes Gesamtgewicht von 219g ohne Akku. Der kleine sollte also einen ordentlichen Schub entwickeln. Vielen Dank nochmal an Thorsten, für den Mini Speed-Frame!
Ich finde ihn optisch mit dem blauen Akzenten eigentlich sehr gelungen. Was sagt ihr?
19.04.2015 - Schritt4 - Testflug
Testflug und die passenden PIDs finden..
Gruß
Jan
Zuletzt bearbeitet:

