
Mir kam der Gedanke mal so ein Ding zu bauen.
Da ich noch nen alten APM1 hier rumliegen hatte, ein Xbee,Motoren und 40 Amp Regler,8000er 3S Accu,GPS noch übrig waren
ging es an die Arbeit.
Baumarkt war nicht weit. Alle Bauteile(Holz) stammen von dort.
Der Rumpf war schnell entworfen ohne viel sägerei.
Dichtigkeit: mit Holzgrund behandelt,geschliffen.
mehrmals lakiert. sämtliche Spalten wurden noch vorher verspachtelt.
Meine Idee war es noch im Boden ein Loch einzulassen. Das Ganze schmückt dann eine halbe
Acrylglaskugel die zum dreivirtelsten Teil ins Wasser ragen soll.
Eingeklebt mit speziellem Kleber. Auf dem Holzboden werden 6 kleine vierkantholstücken sternfärmig aufgebracht
und an der Kugel verschraubt. Ist noch im Bau.
Vielleicht sieht man dann bei klarem Wasser mit einer 700 TV linien Kamera mit 0,00001 Lux Empfindlichkeit etwas
unter Wasser.
Rechts und Links der Kamera werden noch LED's zuschaltbar und vor allem schwenkbar mit ca. 12V u. 1W Leistung
angebracht. Sind leider noch nicht da.
Auf dem Bug ist noch ne Halterung für eventuelles Eqipment für FPV auf dem Wasser.
Das Heck schmückt ein etwas übergroßes Ruder. Ich habe die Erfahrung gemacht
das kleine Ruder für meine Version etwas träge in der Lenkung des ganzen waren.
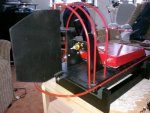
wie siehe Bilder wurde auf der Abnehmbaren Seite hier in rot das GPS und Xbee montiert.
Alles suber unter ner 40iger Acrylglskugel verstaut.
Im Hinteren Teil der abnehmbaren Box sitzt der Lipowarner und ein kleiner Schalter.
Ebenfalls unter einer Acrylglaskugel.
Mit dem Schalter wird der APM eingeschalten. Warum?
Da ja die ganze Elektronik im Abnehmbaren Teil sitzt und es etwas dauert bis der sagen wir mal Deckel dazu,
verschraubt und in Position sitzt und da der APM initialisiert bevor alles gut sitzt, kann ich den APM
dann anschalten.
Als Software ist das Airplane aufgespielt.
Da muß ich noch etwas tüfteln.
Ruder und Motorsteuerung funktionieren schon mal.
In dem Stabimodus sollte eigentlich das Ruder gerade gehalten werden. Funktioniert noch nicht.
Vielleicht habt ihr nen Vorschlag für mich wie man das lösen könnte.
Da ich weis was so ein Ding an Geschwindigkeit leisten kann bräuchte ich das schon.
Ich hab mal eins zum Abheben gebracht und bei Geschwindigkeit macht es auch ganz schön hin und her.
Als Schutz für den ganzen Bootskörper ist um das Boot ein Rundstahlbügel.
Soll auch verhindern sich an irgend etwas zu verfangen was aus dem Wasser ragt.
Anbei die ersten Bilder von meiner Konstruktion.
Fortsetzung folgt.
Da ich noch nen alten APM1 hier rumliegen hatte, ein Xbee,Motoren und 40 Amp Regler,8000er 3S Accu,GPS noch übrig waren
ging es an die Arbeit.
Baumarkt war nicht weit. Alle Bauteile(Holz) stammen von dort.
Der Rumpf war schnell entworfen ohne viel sägerei.
Dichtigkeit: mit Holzgrund behandelt,geschliffen.
mehrmals lakiert. sämtliche Spalten wurden noch vorher verspachtelt.
Meine Idee war es noch im Boden ein Loch einzulassen. Das Ganze schmückt dann eine halbe
Acrylglaskugel die zum dreivirtelsten Teil ins Wasser ragen soll.
Eingeklebt mit speziellem Kleber. Auf dem Holzboden werden 6 kleine vierkantholstücken sternfärmig aufgebracht
und an der Kugel verschraubt. Ist noch im Bau.
Vielleicht sieht man dann bei klarem Wasser mit einer 700 TV linien Kamera mit 0,00001 Lux Empfindlichkeit etwas
unter Wasser.
Rechts und Links der Kamera werden noch LED's zuschaltbar und vor allem schwenkbar mit ca. 12V u. 1W Leistung
angebracht. Sind leider noch nicht da.
Auf dem Bug ist noch ne Halterung für eventuelles Eqipment für FPV auf dem Wasser.
Das Heck schmückt ein etwas übergroßes Ruder. Ich habe die Erfahrung gemacht
das kleine Ruder für meine Version etwas träge in der Lenkung des ganzen waren.
wie siehe Bilder wurde auf der Abnehmbaren Seite hier in rot das GPS und Xbee montiert.
Alles suber unter ner 40iger Acrylglskugel verstaut.
Im Hinteren Teil der abnehmbaren Box sitzt der Lipowarner und ein kleiner Schalter.
Ebenfalls unter einer Acrylglaskugel.
Mit dem Schalter wird der APM eingeschalten. Warum?
Da ja die ganze Elektronik im Abnehmbaren Teil sitzt und es etwas dauert bis der sagen wir mal Deckel dazu,
verschraubt und in Position sitzt und da der APM initialisiert bevor alles gut sitzt, kann ich den APM
dann anschalten.
Als Software ist das Airplane aufgespielt.
Da muß ich noch etwas tüfteln.
Ruder und Motorsteuerung funktionieren schon mal.
In dem Stabimodus sollte eigentlich das Ruder gerade gehalten werden. Funktioniert noch nicht.
Vielleicht habt ihr nen Vorschlag für mich wie man das lösen könnte.
Da ich weis was so ein Ding an Geschwindigkeit leisten kann bräuchte ich das schon.
Ich hab mal eins zum Abheben gebracht und bei Geschwindigkeit macht es auch ganz schön hin und her.
Als Schutz für den ganzen Bootskörper ist um das Boot ein Rundstahlbügel.
Soll auch verhindern sich an irgend etwas zu verfangen was aus dem Wasser ragt.
Anbei die ersten Bilder von meiner Konstruktion.
Fortsetzung folgt.
Anhänge
-
 35,8 KB Aufrufe: 34
35,8 KB Aufrufe: 34 -
 40,4 KB Aufrufe: 28
40,4 KB Aufrufe: 28 -
 32,4 KB Aufrufe: 30
32,4 KB Aufrufe: 30 -
 38,4 KB Aufrufe: 28
38,4 KB Aufrufe: 28 -
 39,5 KB Aufrufe: 27
39,5 KB Aufrufe: 27 -
 28,6 KB Aufrufe: 26
28,6 KB Aufrufe: 26

 )
)
