Aktueller Stand: Probleme mit dem EZFW, da es unter den Gimbal Rails ist 
Da ich der Meinung bin, dass ich langsam den Grundthread für den Rahmen zu sehr zu Mülle, mach ich einfach nen Baubericht auf... gibt aktuell auch mehr Probleme als erwartet
Und noch eine Sache vorweg, über Verbesserungsvorschläge würde ich mich sehr freuen, wobei ich kein Gewichtsfetischist bin.
Geplanter Aufbau:
- Alien H4 450
- Pixhawk
- Drotek M8N GPS mit Kompass
- Telemetrie an Pixhawk
- AfroSlim 30A in den Armen mit dickerem Kabel
- DYS BE2212-880
- 10x4.5 bzw. 10x5 Propeller, Testweise vielleicht mal 11x4.7
- 4S 5200mAh MultiStar Akkus
- Einziehfahrwerk unter den Motoren mit Retracts
- Gimbal Rails, damit ich die Position des Gimbals nach belieben verändern kann
Ein Bild von der Planung in eCalc:
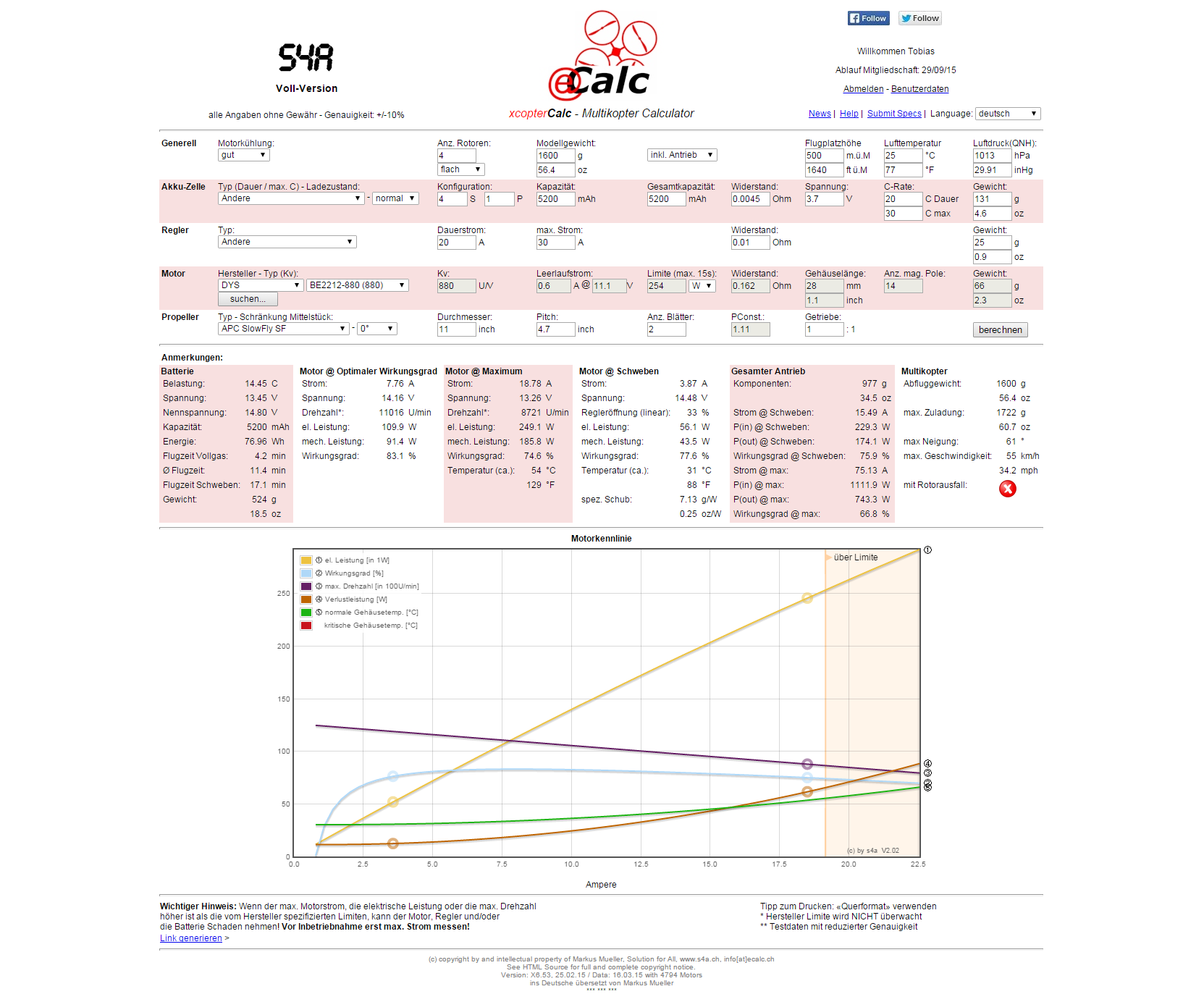
Sah ja schonmal nicht schlecht aus. Mit 11x4.7 vielleicht zu sehr am Limit. Werde Vermutlich Graupner 10x5 benutzen, wenn mal alles fertig ist... Also erstmal alles an Teilen bestellt.
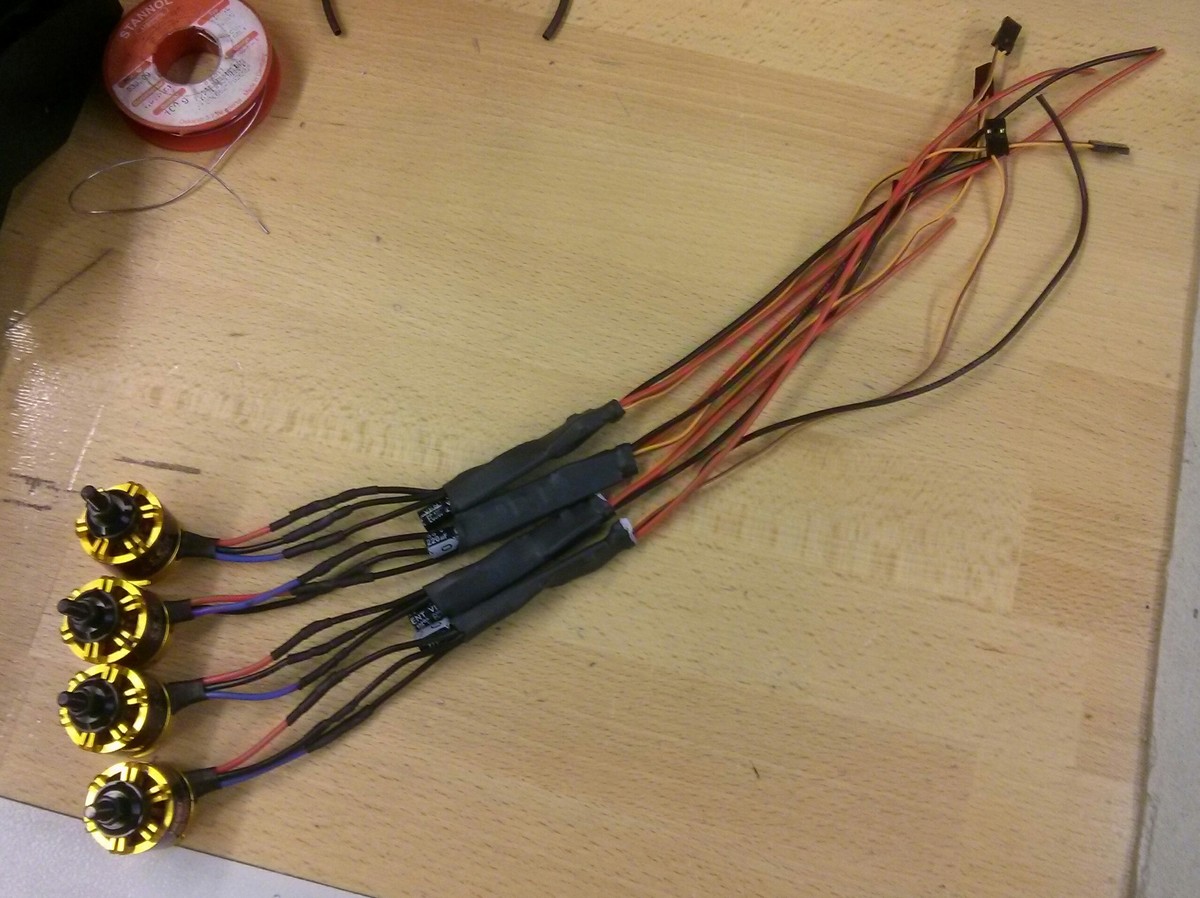
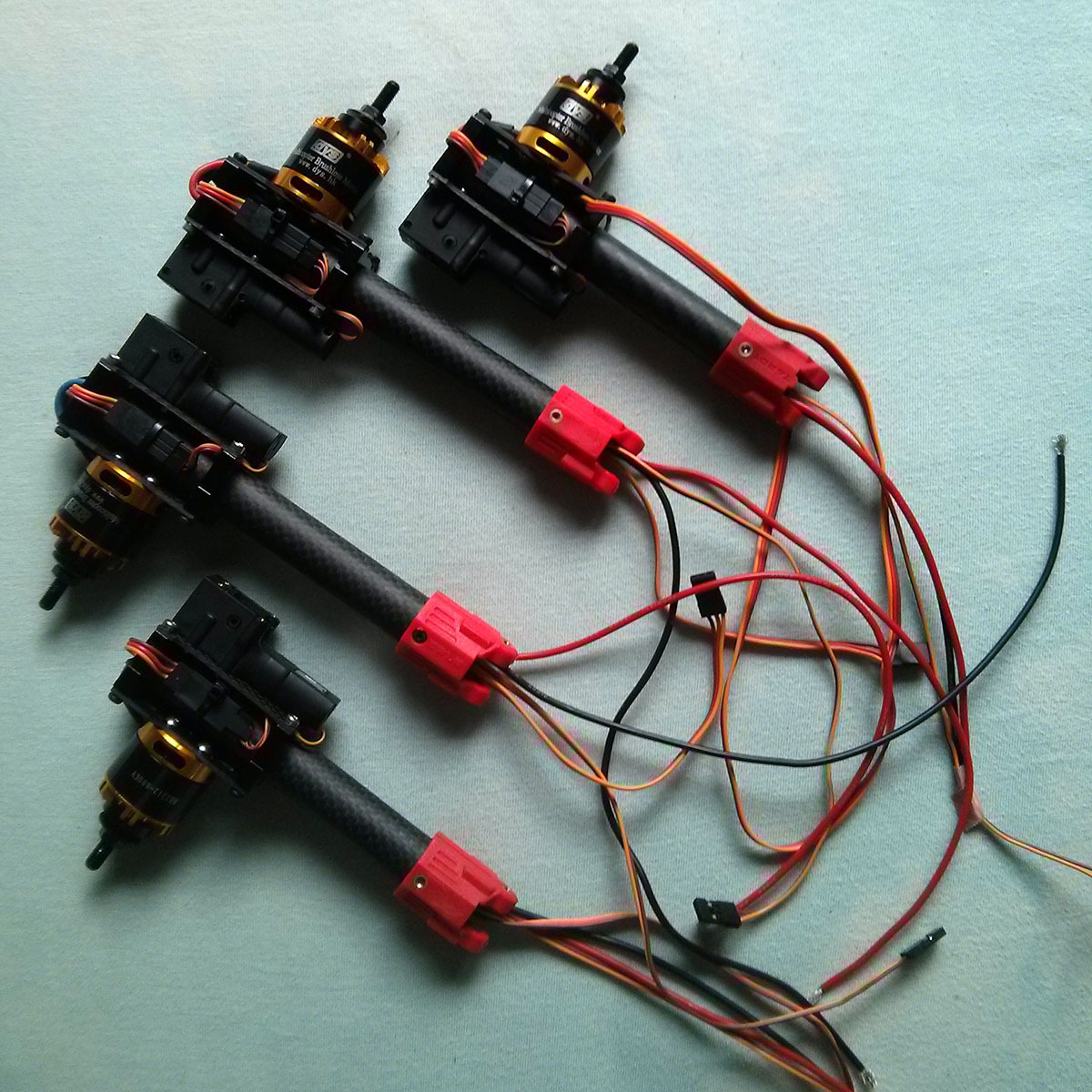
Kabel der Regler habe ich dann auch noch getauscht und alles direkt miteinander fest verlötet.
Dann kam auch der Rahmen

Mit dem Rahmen kamen dann die ersten Probleme. Einer der Arme war ca. 1cm zu kurz und statt wie sonst immer 8 Motorhalter hab ich nur 4 bekommen. Beim Probesitzen der Regler ist mir dann auch noch aufgefallen, dass ich die Kabel vom Regler zum Motor bei den kurzen Armen weiter kürzen muss. Also zwei Regler neu angelötet.
Bild der Arme:

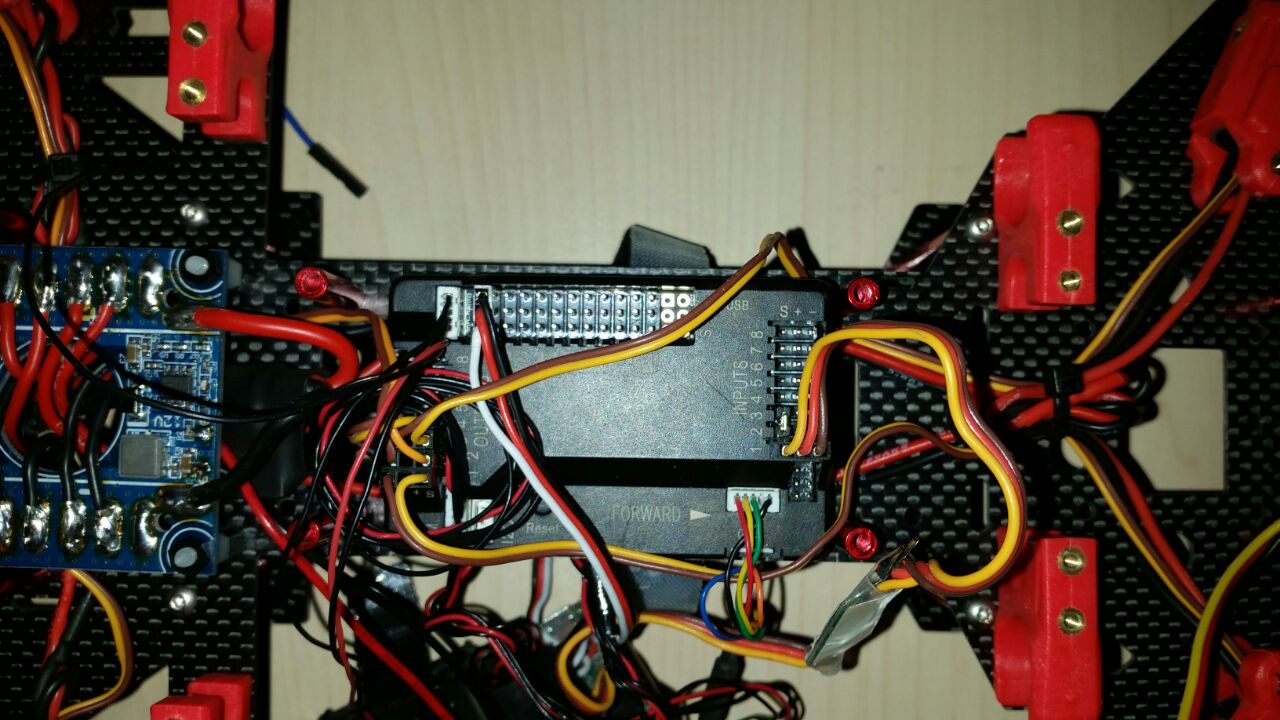
Als nächstes mal den Pixhawk eingesetzt. Der sitzt derbe eng im Rahmen, es mussten sogar zwei Verbinder entfernt werden, damit der überhaupt rein passt und auch alle Anschlüsse genutzt werden können. Sollte trotzdem noch stabil genug sein, ansonsten muss ich mir was einfallen lassen.
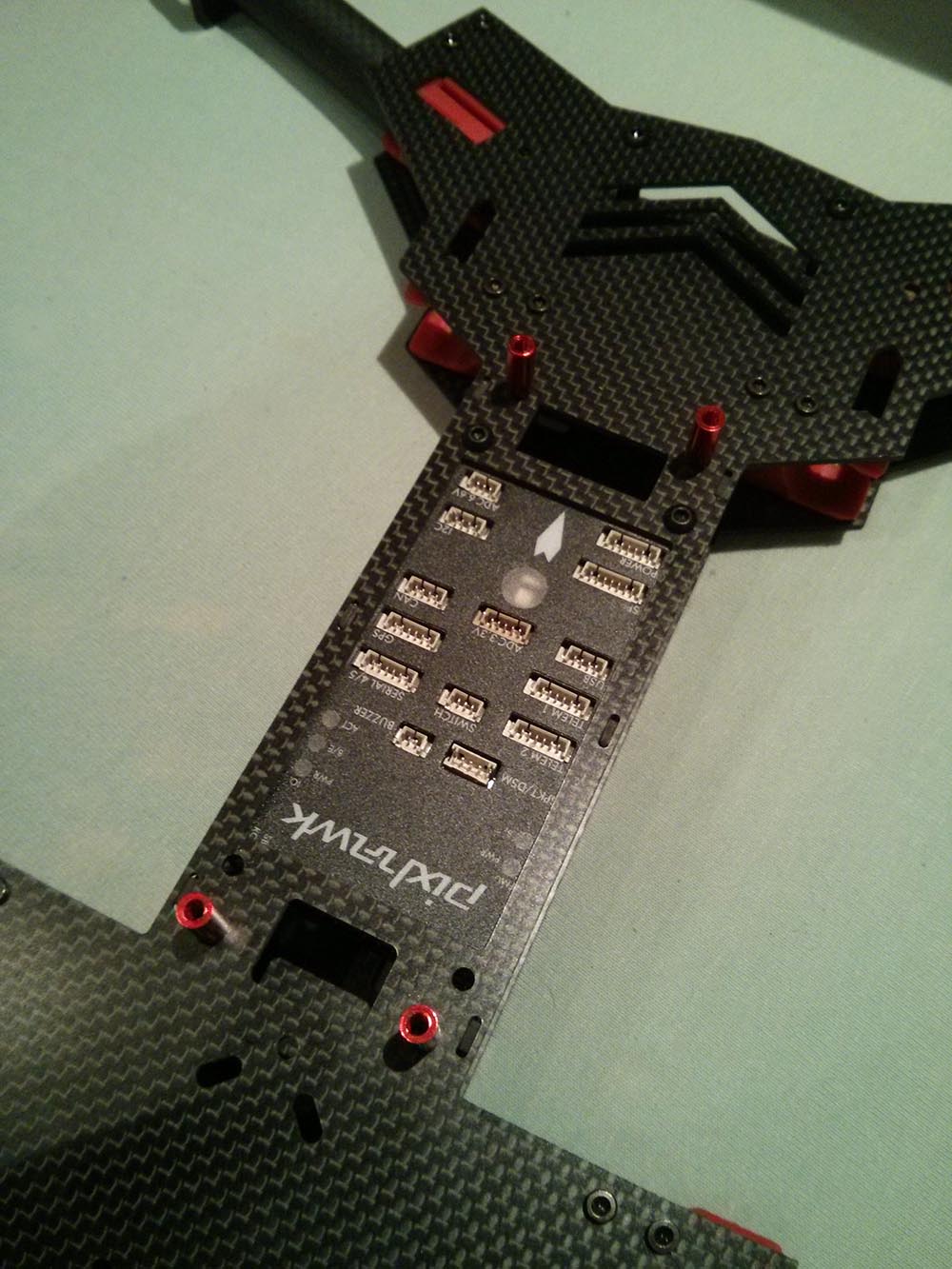

Den USB Port vom Pixhawk war so an der Seite nichtmehr nutzbar, geplant war aber sowieso ein Zusatzmodul mit LED und USB Port.

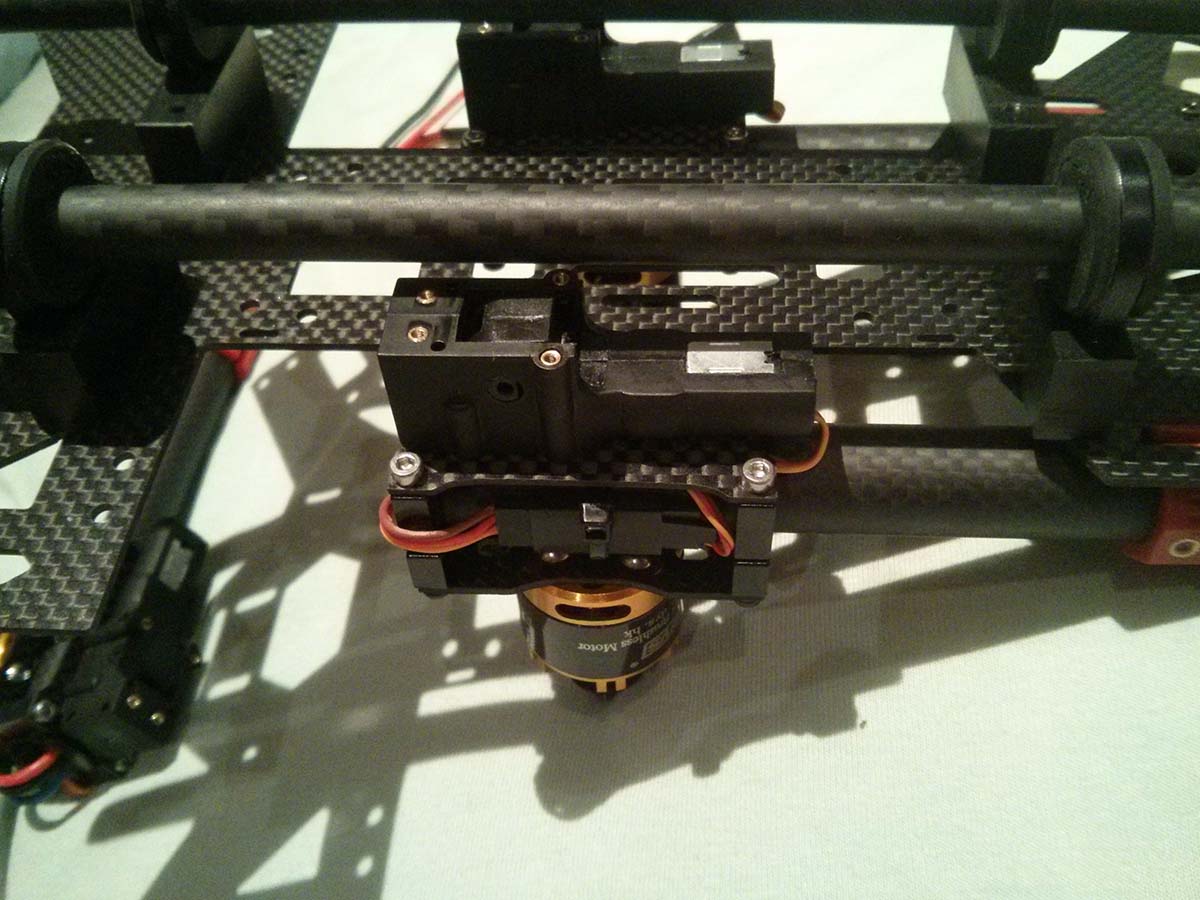
Als nächstes sind die Regler in die Arme gewandert und die Motoren und Retracts an die Motorhalter. Für die Retracts habe ich extra Halter anfertigen lassen.
Geplant habe ich 3mm Carbonstäbe in den Retracts.
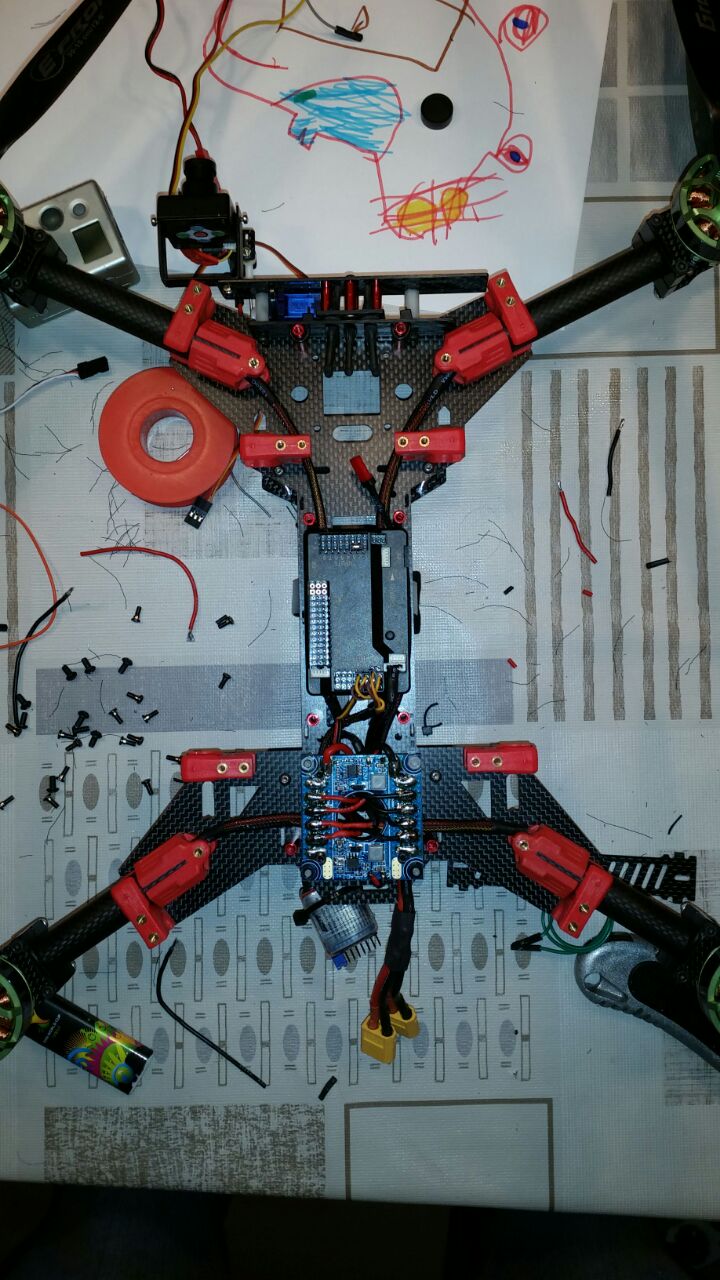
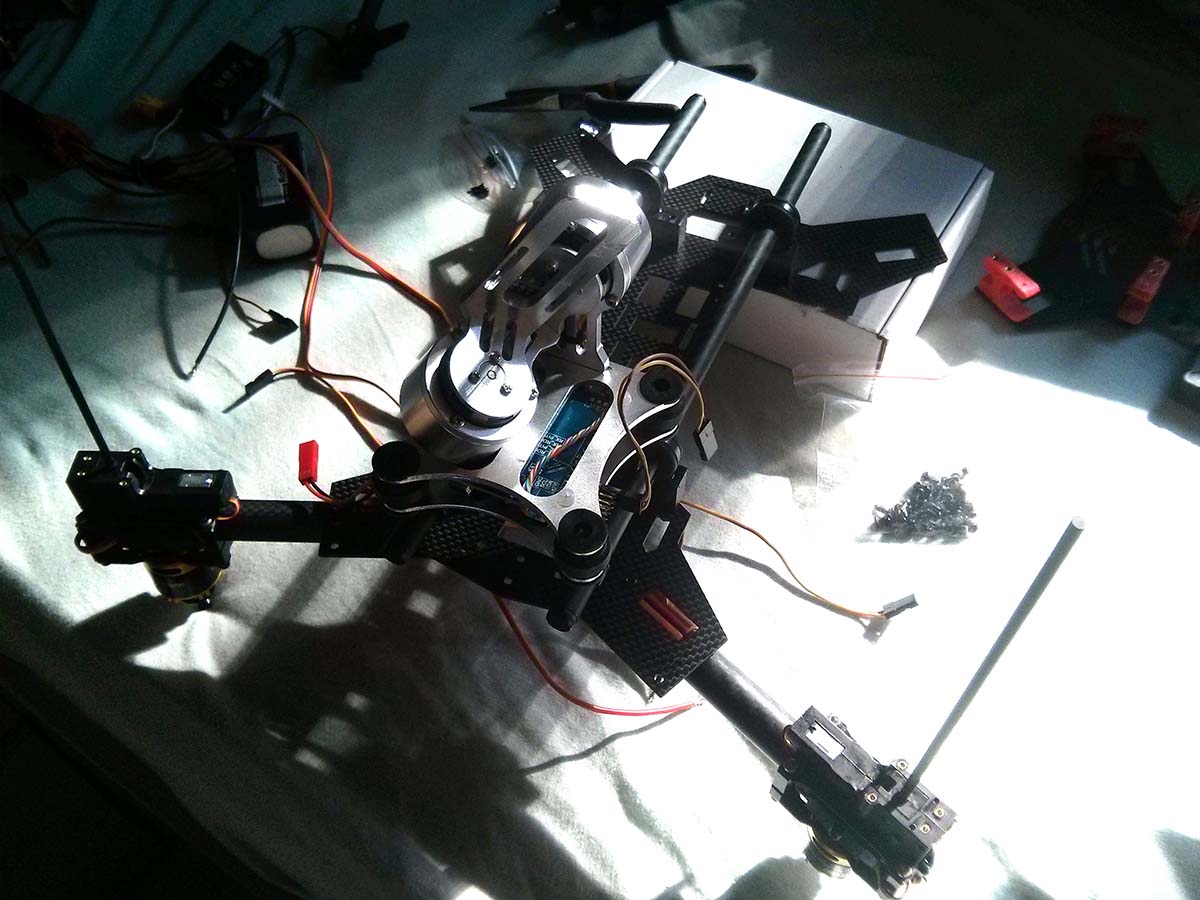
Das ganze Probehalber zusammengesetzt:


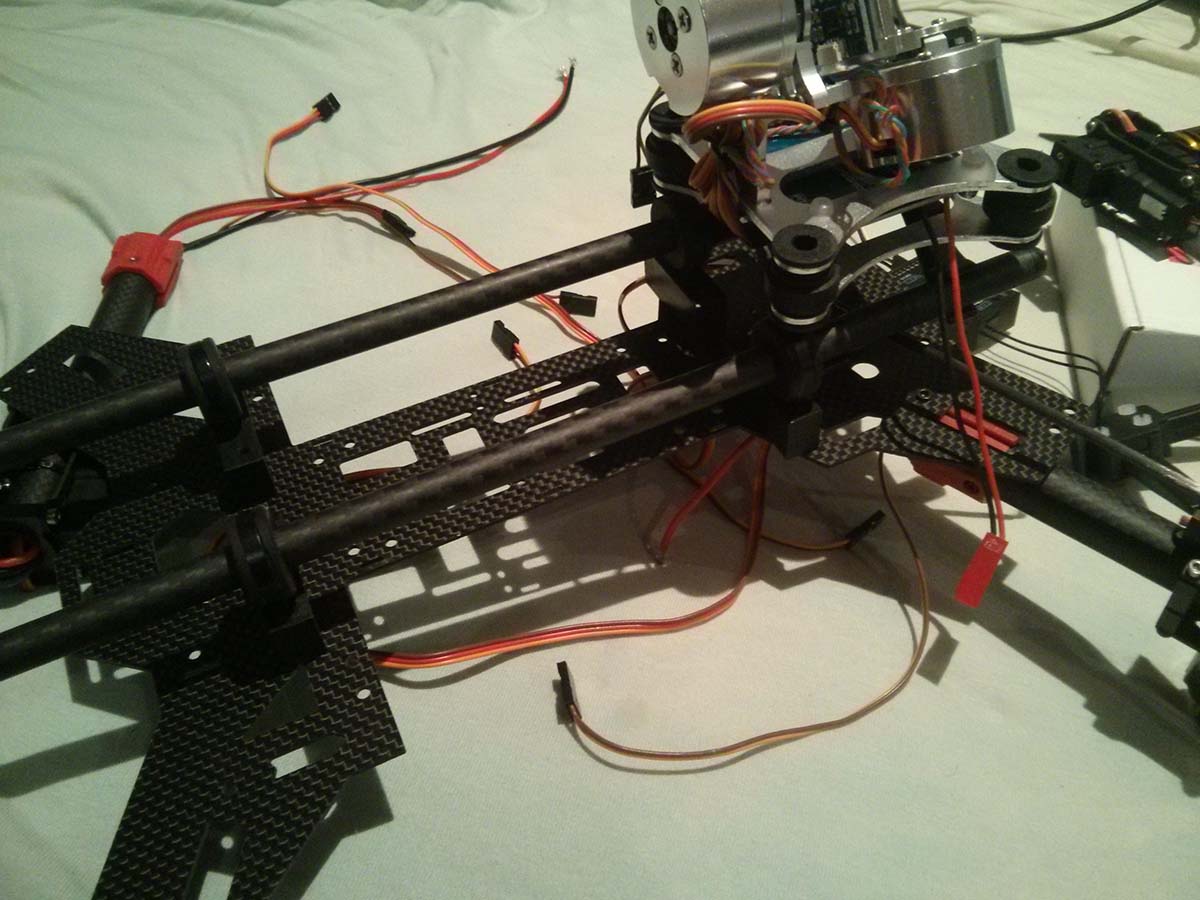
Die geplante Position für die Gimbal Rails sieht man hier (war nur mal testweise aufgelegt)

Dabei hatte ich dann nicht überlegt, dass das Fahrwerk unter die Rails kommen würde.
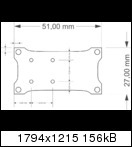
An der Stelle hänge ich momentan etwas... Hier noch ein Bild der ersten Version der Adapter.
Abstand wurde extra so groß gewählt, weil die Retracts ja noch drunter müssen. Die Adapter wurden aus POM gemacht, Stück wiegt auch nur ca. 5.5g oder so.

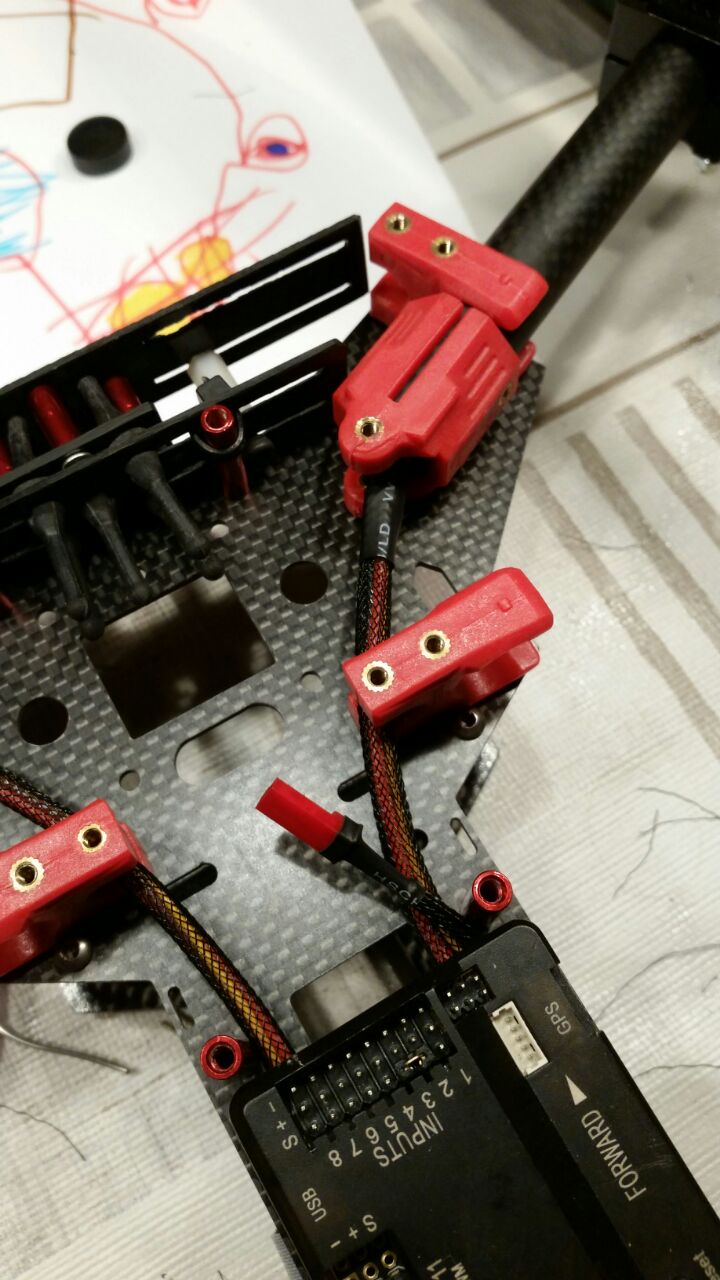
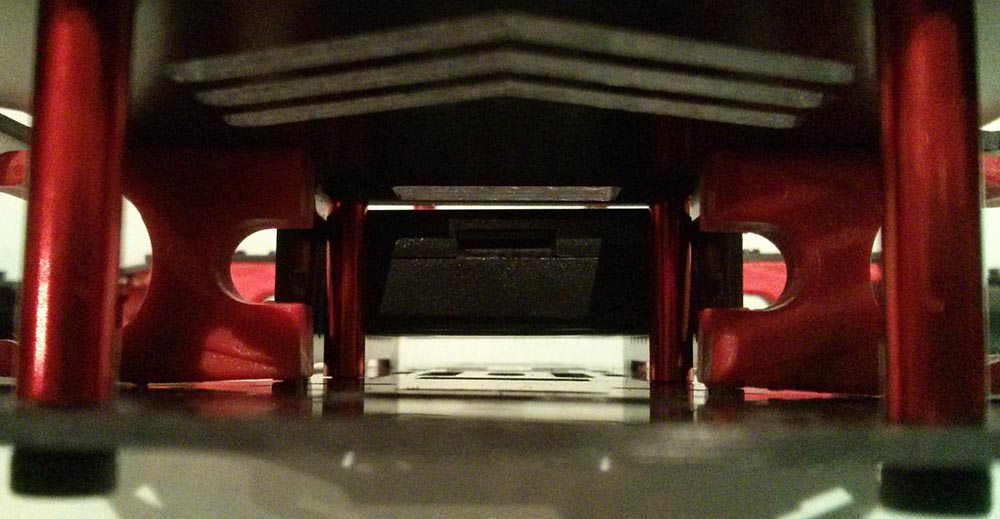
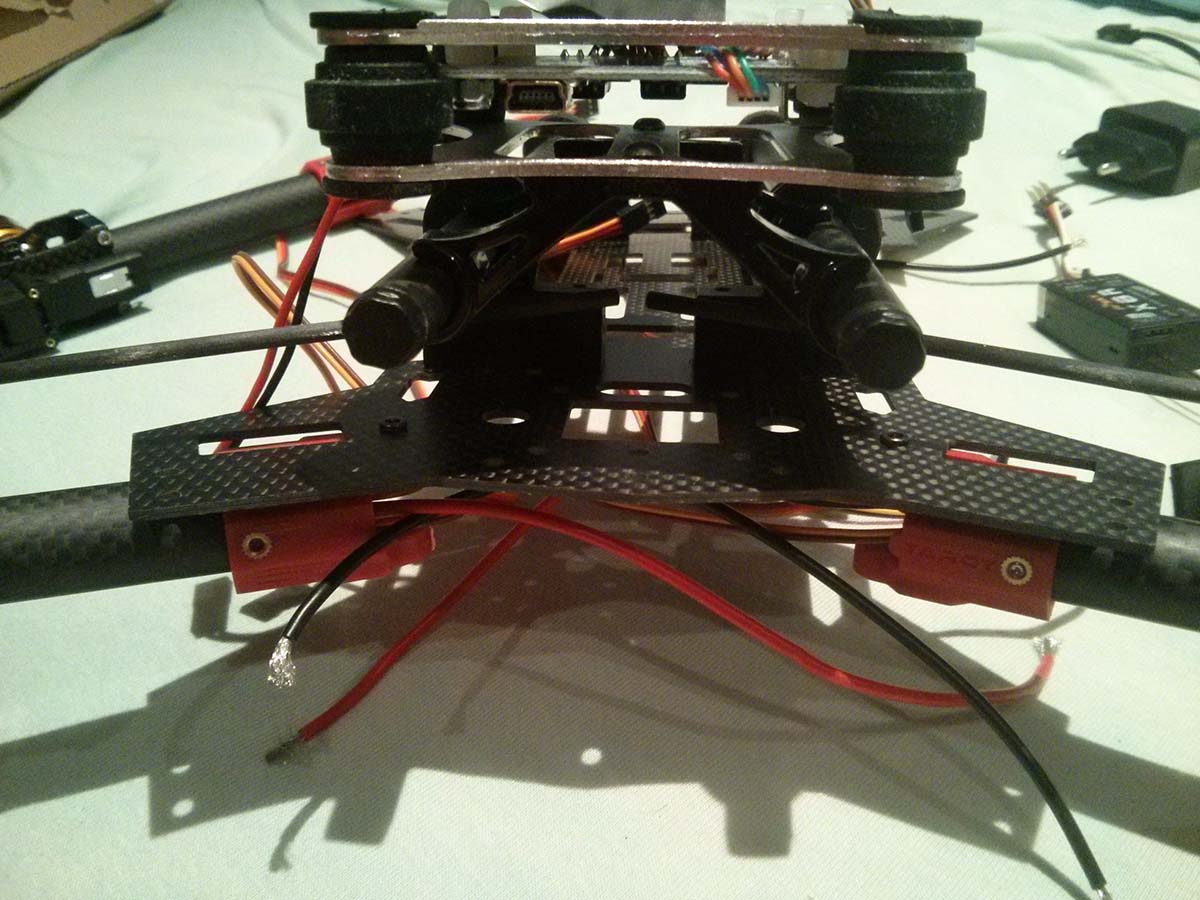
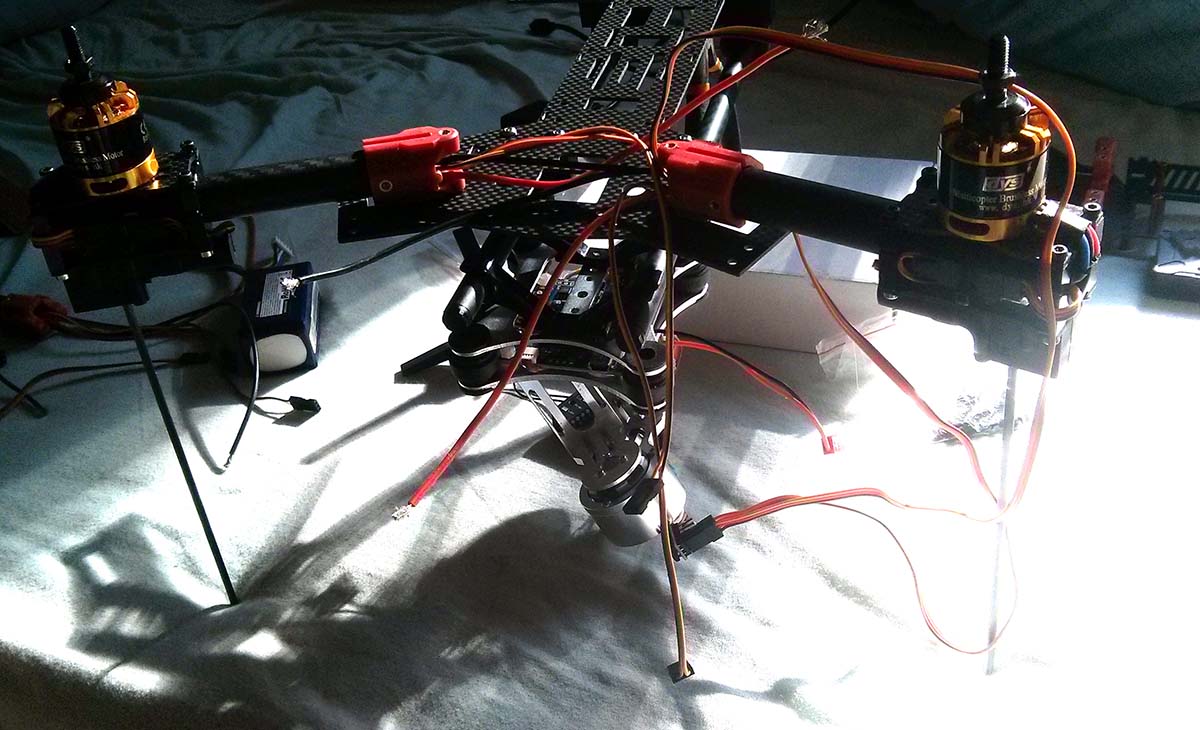
Aktueller Stand mit aktuell größtem Problem: Die Carbonstäbchen der Retracts sind unter den Gimbal Rails... kürzen kann ich die auch nicht wirklich, weil die sonst zu kurz wären.

Direkt auch mal nen Billiggimbal Probweise drunter gehängt. Wollte später ein 3 Achs Gimbal benutzen.
Da ich der Meinung bin, dass ich langsam den Grundthread für den Rahmen zu sehr zu Mülle, mach ich einfach nen Baubericht auf... gibt aktuell auch mehr Probleme als erwartet
Und noch eine Sache vorweg, über Verbesserungsvorschläge würde ich mich sehr freuen, wobei ich kein Gewichtsfetischist bin.
Geplanter Aufbau:
- Alien H4 450
- Pixhawk
- Drotek M8N GPS mit Kompass
- Telemetrie an Pixhawk
- AfroSlim 30A in den Armen mit dickerem Kabel
- DYS BE2212-880
- 10x4.5 bzw. 10x5 Propeller, Testweise vielleicht mal 11x4.7
- 4S 5200mAh MultiStar Akkus
- Einziehfahrwerk unter den Motoren mit Retracts
- Gimbal Rails, damit ich die Position des Gimbals nach belieben verändern kann
Ein Bild von der Planung in eCalc:
Sah ja schonmal nicht schlecht aus. Mit 11x4.7 vielleicht zu sehr am Limit. Werde Vermutlich Graupner 10x5 benutzen, wenn mal alles fertig ist... Also erstmal alles an Teilen bestellt.
Kabel der Regler habe ich dann auch noch getauscht und alles direkt miteinander fest verlötet.
Dann kam auch der Rahmen
Mit dem Rahmen kamen dann die ersten Probleme. Einer der Arme war ca. 1cm zu kurz und statt wie sonst immer 8 Motorhalter hab ich nur 4 bekommen. Beim Probesitzen der Regler ist mir dann auch noch aufgefallen, dass ich die Kabel vom Regler zum Motor bei den kurzen Armen weiter kürzen muss. Also zwei Regler neu angelötet.
Bild der Arme:

Als nächstes mal den Pixhawk eingesetzt. Der sitzt derbe eng im Rahmen, es mussten sogar zwei Verbinder entfernt werden, damit der überhaupt rein passt und auch alle Anschlüsse genutzt werden können. Sollte trotzdem noch stabil genug sein, ansonsten muss ich mir was einfallen lassen.
Den USB Port vom Pixhawk war so an der Seite nichtmehr nutzbar, geplant war aber sowieso ein Zusatzmodul mit LED und USB Port.

Als nächstes sind die Regler in die Arme gewandert und die Motoren und Retracts an die Motorhalter. Für die Retracts habe ich extra Halter anfertigen lassen.

Geplant habe ich 3mm Carbonstäbe in den Retracts.
Das ganze Probehalber zusammengesetzt:
Die geplante Position für die Gimbal Rails sieht man hier (war nur mal testweise aufgelegt)
Dabei hatte ich dann nicht überlegt, dass das Fahrwerk unter die Rails kommen würde.
An der Stelle hänge ich momentan etwas... Hier noch ein Bild der ersten Version der Adapter.
Abstand wurde extra so groß gewählt, weil die Retracts ja noch drunter müssen. Die Adapter wurden aus POM gemacht, Stück wiegt auch nur ca. 5.5g oder so.
Aktueller Stand mit aktuell größtem Problem: Die Carbonstäbchen der Retracts sind unter den Gimbal Rails... kürzen kann ich die auch nicht wirklich, weil die sonst zu kurz wären.
Direkt auch mal nen Billiggimbal Probweise drunter gehängt. Wollte später ein 3 Achs Gimbal benutzen.
Zuletzt bearbeitet: