Ich habe neulich mal überlegt, ob ich ein neues Telefon kaufe. Ich habe mich dann aber für einen neuen Copter entschieden…
Ich wollte eine Plattform, die ein wenig stabiler als ein 5“ fliegt. Oder so. Hatte Bock auf 7“ - aber nicht Ultralongrange als Ziel.
Fand den AOS UL7 interessant und habe nun folgendes Setup zusammengefrickelt:

AOS UL7 Frame
https://www.aos-rc.com/aos-ul7
Speedybee F7 v3 50A Stack SpeedyBee F7 V3 BL32 50A 30x30 Stack
Motor Xing 2806.5 1300KV XING 2806.5 FPV Cinelifiter Motor
Crossfire Nano Diversity / 1x Immortal-T extra long & 1x Immortal-T
GPS GOKU GM10 Pro v3 https://flywoo.net/products/goku-gm10-pro-v3-gps-w-compass
ViFly GPS Mate https://viflydrone.com/products/vifly-gps-mat
DJI O3 Airunit (meine erste)
Antenna 5.8GHz LHCP 100mm (RP-SMA) https://iflight-rc.eu/de-de/products/antenna-5-8ghz-lhcp-100mm-rp-sma
TPU Druckteile & eigene dazu
AOS UL7 TPU Masterpack - AOS 7 by accrobrandon
Thingiverse - Digital Designs for Physical Objects
DJI O3 Air Unit 20x20mm to 25x25mm Adapter by Roro73
iFlight LI-Ion 6s2p 6000mAh
Akkustraps FETtec Kevlar Lipo Strap
Props aktuell HQ 7x4x3
Schrauben werden gerade ausreichend mitgeliefert, sowie Druckteile in Form von vier schwarzen Armbumpern, einem Kamera-Mount und einem Antennenhalter.
Dazu ein Inbusschlüssel M3 - der für die Schraube am Kameramount passt, ansonsten aber für die Montage komplett nutzlos ist.

Der Aufbau des Frames fängt mit den Motorgondeln und den Armen an.
Es gab mal kurz den Plan, die Motorkabel in Gewebeschlauch zu verlegen.
Jeweils ein Stück 3:1 klebender Schrumpfschlauch am Übergang Motor zum Arm und etwas Klebeband sollten aber reichen, ist auch zugänglicher.
Bei der weiteren Montage helfen Kabelbinder, um die Arme an der Baseplate zu fixieren!
Die Montage der Topplate ist übrigens erstaunlich einfach - nicht das erwartete unendliche Gefummel mit den acht Armauslegern.
Ich hatte gelesen, dass die Aufnahmen nachgeschliffen werden müssten - hier aber kein Problem mit der Passung.
Eine Hero11mini soll mitfliegen. Um einen passenden Schwerpunkt zu erreichen, muss der Akku weiter nach hinten.
Der Akku muss somit „hochkant liegen“- sonst gibt es hinten Kontakt mit den Props. Die runde Form der Topplate entspricht aussen fast den 7“ Props.
Der Akkuanschluss liegt nun also vorne hinter der GoPro.
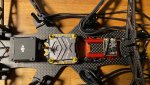
Damit wird es aber auch etwas enger zwischen FC und Airunit. Habe da verschiedene Versionen durchgespielt - Airunit hinten, FC gedreht etc. und mich am Ende für diesen Aufbau (siehe Fotos) entschieden.
Die O3 Airunit hinten funktioniert nur mit einem sehr langen Kabel zur Cam - ich vermute, selbst das 200mm Kabel zu knapp.
Der Frame könnte gerne - etwas weiter vorne - zusätzliche Bohrlöcher für die Airunit haben.



Selber bohren schafft nicht viel Platz, da durch den dreieckigen Ausschnitt nicht genug Material für Bohrungen da ist. (Oder halt gedruckte Adapter)
Für den Cossfire Nano Rx (und ggf. mehr) ist da aber überall genug Platz - vorne oder hinten.


Damit zu den Antennen:
Die erste Antenne (Immortal-T extra long) vorne finde ich von der Positionierung sinnvoll (berichtigt mich gerne).
Die zweite habe ich aktuell 90° am hinteren linken Arm befestigt, soll aber noch senkrecht irgendwo hin, vermutlich am Heck. Da fehlt mir noch die gefällige Idee zur Montage.
Die Befestigung der Vtx Antennen in der Mitte des Frames ist kurz nervig, da der FC-USB-Port damit nicht direkt zugänglich ist. Aber der FC spricht ja auch kabellos mit der Speedybee App. Der Antennenmount ist aber auch schnell abgeschraubt.
Der Crossfire Diversity Nano bekam hinten seinen Platz. Davor ein ViFly GPS Mate - der fliegt vielleicht wieder raus, da der GPS-Fix bisher schnell da ist und es tw. indoor in Fensternähe schon einen Fix gibt. Beobachte ich weiter.
Aktuell ist Betaflight 4.4.2 mit Presets für Crossfire 150Hz und AOS UL7 von Chris Rosser installiert. Kompass nicht aktiv.
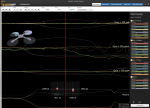
Die Heatmap der Blackbox sieht der im Rosser Video schonmal ähnlich aus.


Bisher konnte ich leider nur zwei halbe Akkus überm Acker fliegen. Wetter & Arbeit funken dazwischen… und zu früh dunkel.
+ Crossfire zeigt soweit super stabile Werte
+ man fliegt irgendwie gleich noch etwas grossräumiger - macht jetzt schon Spass!!!
+ Airunit Aufnahme zusätzlich verfügbar
+ bisher sehr stabiles Bild von der O3 (mit Goggle v2)
+ Topplate einfacher als erwartet zu montieren
+ es könnten mit dem 6S 6000mAh bis ~20 Minuten Flugzeit werden
+ Fliegt wie auf Schienen
- Am meisten nervt mich aktuell an der O3, dass man nicht so einfach die OSD Daten in Videos einbinden kann. Finde ich bei der Vista immer mal gut, um sich Daten im Video nochmal anzusehen zu können. Probiere das nochmal über die Logs von EdgeTX.
- Mehr Bohrungen zur flexibleren Montage der Komponenten vorne wären toll.
- Etwas längere Arme für 7,5“ plus somit mehr Platz für den Akku wären ein schönes Upgrade des Frames (Rosser wird sich dabei aber wohl was gedacht haben).
- Antennen in der Mitte stören etwas - kann ich aber mit leben. Der USB Anschluss des Speedybee FC ist nicht zugänglich, ohne den linken Antennenmount zu lösen.
Voll abflugbereit 1400g.






Zweiter Flug:
Ich wollte eine Plattform, die ein wenig stabiler als ein 5“ fliegt. Oder so. Hatte Bock auf 7“ - aber nicht Ultralongrange als Ziel.
Fand den AOS UL7 interessant und habe nun folgendes Setup zusammengefrickelt:
AOS UL7 Frame
https://www.aos-rc.com/aos-ul7
Motor Xing 2806.5 1300KV XING 2806.5 FPV Cinelifiter Motor
Crossfire Nano Diversity / 1x Immortal-T extra long & 1x Immortal-T
GPS GOKU GM10 Pro v3 https://flywoo.net/products/goku-gm10-pro-v3-gps-w-compass
ViFly GPS Mate https://viflydrone.com/products/vifly-gps-mat
DJI O3 Airunit (meine erste)
Antenna 5.8GHz LHCP 100mm (RP-SMA) https://iflight-rc.eu/de-de/products/antenna-5-8ghz-lhcp-100mm-rp-sma
TPU Druckteile & eigene dazu
AOS UL7 TPU Masterpack - AOS 7 by accrobrandon
Thingiverse - Digital Designs for Physical Objects
DJI O3 Air Unit 20x20mm to 25x25mm Adapter by Roro73
iFlight LI-Ion 6s2p 6000mAh
Akkustraps FETtec Kevlar Lipo Strap
Props aktuell HQ 7x4x3
Schrauben werden gerade ausreichend mitgeliefert, sowie Druckteile in Form von vier schwarzen Armbumpern, einem Kamera-Mount und einem Antennenhalter.
Dazu ein Inbusschlüssel M3 - der für die Schraube am Kameramount passt, ansonsten aber für die Montage komplett nutzlos ist.
Der Aufbau des Frames fängt mit den Motorgondeln und den Armen an.
Es gab mal kurz den Plan, die Motorkabel in Gewebeschlauch zu verlegen.
Jeweils ein Stück 3:1 klebender Schrumpfschlauch am Übergang Motor zum Arm und etwas Klebeband sollten aber reichen, ist auch zugänglicher.
Bei der weiteren Montage helfen Kabelbinder, um die Arme an der Baseplate zu fixieren!
Die Montage der Topplate ist übrigens erstaunlich einfach - nicht das erwartete unendliche Gefummel mit den acht Armauslegern.
Ich hatte gelesen, dass die Aufnahmen nachgeschliffen werden müssten - hier aber kein Problem mit der Passung.
Eine Hero11mini soll mitfliegen. Um einen passenden Schwerpunkt zu erreichen, muss der Akku weiter nach hinten.
Der Akku muss somit „hochkant liegen“- sonst gibt es hinten Kontakt mit den Props. Die runde Form der Topplate entspricht aussen fast den 7“ Props.
Der Akkuanschluss liegt nun also vorne hinter der GoPro.
Damit wird es aber auch etwas enger zwischen FC und Airunit. Habe da verschiedene Versionen durchgespielt - Airunit hinten, FC gedreht etc. und mich am Ende für diesen Aufbau (siehe Fotos) entschieden.
Die O3 Airunit hinten funktioniert nur mit einem sehr langen Kabel zur Cam - ich vermute, selbst das 200mm Kabel zu knapp.
Der Frame könnte gerne - etwas weiter vorne - zusätzliche Bohrlöcher für die Airunit haben.
Selber bohren schafft nicht viel Platz, da durch den dreieckigen Ausschnitt nicht genug Material für Bohrungen da ist. (Oder halt gedruckte Adapter)
Für den Cossfire Nano Rx (und ggf. mehr) ist da aber überall genug Platz - vorne oder hinten.
Damit zu den Antennen:
Die erste Antenne (Immortal-T extra long) vorne finde ich von der Positionierung sinnvoll (berichtigt mich gerne).
Die zweite habe ich aktuell 90° am hinteren linken Arm befestigt, soll aber noch senkrecht irgendwo hin, vermutlich am Heck. Da fehlt mir noch die gefällige Idee zur Montage.
Die Befestigung der Vtx Antennen in der Mitte des Frames ist kurz nervig, da der FC-USB-Port damit nicht direkt zugänglich ist. Aber der FC spricht ja auch kabellos mit der Speedybee App. Der Antennenmount ist aber auch schnell abgeschraubt.
Der Crossfire Diversity Nano bekam hinten seinen Platz. Davor ein ViFly GPS Mate - der fliegt vielleicht wieder raus, da der GPS-Fix bisher schnell da ist und es tw. indoor in Fensternähe schon einen Fix gibt. Beobachte ich weiter.
Aktuell ist Betaflight 4.4.2 mit Presets für Crossfire 150Hz und AOS UL7 von Chris Rosser installiert. Kompass nicht aktiv.
Die Heatmap der Blackbox sieht der im Rosser Video schonmal ähnlich aus.
Bisher konnte ich leider nur zwei halbe Akkus überm Acker fliegen. Wetter & Arbeit funken dazwischen… und zu früh dunkel.
+ Crossfire zeigt soweit super stabile Werte
+ man fliegt irgendwie gleich noch etwas grossräumiger - macht jetzt schon Spass!!!
+ Airunit Aufnahme zusätzlich verfügbar
+ bisher sehr stabiles Bild von der O3 (mit Goggle v2)
+ Topplate einfacher als erwartet zu montieren
+ es könnten mit dem 6S 6000mAh bis ~20 Minuten Flugzeit werden
+ Fliegt wie auf Schienen
- Am meisten nervt mich aktuell an der O3, dass man nicht so einfach die OSD Daten in Videos einbinden kann. Finde ich bei der Vista immer mal gut, um sich Daten im Video nochmal anzusehen zu können. Probiere das nochmal über die Logs von EdgeTX.
- Mehr Bohrungen zur flexibleren Montage der Komponenten vorne wären toll.
- Etwas längere Arme für 7,5“ plus somit mehr Platz für den Akku wären ein schönes Upgrade des Frames (Rosser wird sich dabei aber wohl was gedacht haben).
- Antennen in der Mitte stören etwas - kann ich aber mit leben. Der USB Anschluss des Speedybee FC ist nicht zugänglich, ohne den linken Antennenmount zu lösen.
Voll abflugbereit 1400g.
Zweiter Flug:
Anhänge
-
 2,4 MB Aufrufe: 10
2,4 MB Aufrufe: 10 -
 2,1 MB Aufrufe: 11
2,1 MB Aufrufe: 11 -
 2,3 MB Aufrufe: 14
2,3 MB Aufrufe: 14