
Hallo Zusammen,
da ich in der Welt der „Multirotoren“ quasi „neu“ bin benötige ich bei einem Problem eure Hilfe.
Ich habe mir einen Quad auf Basis von dem hier vorgestellten „Faltkopter“ aufgebaut (APM 2.6 von HK). Das ging überraschend reibungslos, bisher hat das Teil ca. 5 Flugstunden ohne Zwischenfall absolviert.
Gestern wollte ich dann mal die PID etwas optimieren und merkte schon beim Starten das irgendwas nicht stimmt:
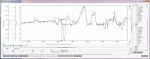
Abgehoben im Stabi-Mode waren die Höhenangaben (Telemetrie auf der Taranis) nicht stabil / korrekt. Teilweise waren Anzeigen von -20 Metern bis +20 Metern beim schweben in 2-3m zu sehen. Aus dem Logfile hab ich mal eine Stelle ausgewählt wo die Angabe mal auf -20m rauscht. Wie es aussieht ist die „BarAlt“ ok aber „Alt“ ist daneben. Was mich auch wundert ist, das „Alt“ und „relAlt“ vom GPS identisch sind – kurz ich werde aus dem Log nicht richtig schlau :-(. Ein Umschalten in den Loiter-Mode ließ den Copter auf und ab hüpfen.
Das Teil habe ich so wie es vor einer Woche flog eingepackt und gestern wieder Ausgepackt --> jetzt das Problem. So typtische / einfache Sachen wie Vibrationen (Stück vom Prob ausgebrochen) oder Schaumstoff übern Baro / Lichtempfindlichkeit hab ich schon geprüft.
Kurz ich bin etwas ratlos …
Gruß
Frank
da ich in der Welt der „Multirotoren“ quasi „neu“ bin benötige ich bei einem Problem eure Hilfe.
Ich habe mir einen Quad auf Basis von dem hier vorgestellten „Faltkopter“ aufgebaut (APM 2.6 von HK). Das ging überraschend reibungslos, bisher hat das Teil ca. 5 Flugstunden ohne Zwischenfall absolviert.
Gestern wollte ich dann mal die PID etwas optimieren und merkte schon beim Starten das irgendwas nicht stimmt:
Abgehoben im Stabi-Mode waren die Höhenangaben (Telemetrie auf der Taranis) nicht stabil / korrekt. Teilweise waren Anzeigen von -20 Metern bis +20 Metern beim schweben in 2-3m zu sehen. Aus dem Logfile hab ich mal eine Stelle ausgewählt wo die Angabe mal auf -20m rauscht. Wie es aussieht ist die „BarAlt“ ok aber „Alt“ ist daneben. Was mich auch wundert ist, das „Alt“ und „relAlt“ vom GPS identisch sind – kurz ich werde aus dem Log nicht richtig schlau :-(. Ein Umschalten in den Loiter-Mode ließ den Copter auf und ab hüpfen.
Das Teil habe ich so wie es vor einer Woche flog eingepackt und gestern wieder Ausgepackt --> jetzt das Problem. So typtische / einfache Sachen wie Vibrationen (Stück vom Prob ausgebrochen) oder Schaumstoff übern Baro / Lichtempfindlichkeit hab ich schon geprüft.
Kurz ich bin etwas ratlos …
Gruß
Frank
Anhänge
-
 344,1 KB Aufrufe: 11
344,1 KB Aufrufe: 11 -
 345,8 KB Aufrufe: 13
345,8 KB Aufrufe: 13

