Hallo Freunde,
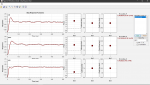
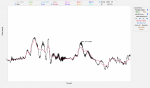
ich beginne mich mit den Blackbox Daten zu befassen.
Könnte mir vielleicht jemand bei der Bewertung der gewonnenen Daten helfen?
Leider konnte ich nur im Garten fliegen und wegen der engen Platzverhältnisse
bestimmt keinen optimalen Flug darstellen.
Es würde mir aber trotzdem helfen, wenn ich eine Einschätzung eines Experten
bekäme, um zu lernen, worauf zu achten ist.
Es handelt sich bei dem Copter um meinen erst kürzlich auf DJI aufgerüsteten
Tinyhawk II Freestyle, den ich in dem Flug mit 2S betrieben habe.
Hier die Daten:
Dropbox - btfl_002.bbl - Simplify your life
ich beginne mich mit den Blackbox Daten zu befassen.
Könnte mir vielleicht jemand bei der Bewertung der gewonnenen Daten helfen?
Leider konnte ich nur im Garten fliegen und wegen der engen Platzverhältnisse
bestimmt keinen optimalen Flug darstellen.
Es würde mir aber trotzdem helfen, wenn ich eine Einschätzung eines Experten
bekäme, um zu lernen, worauf zu achten ist.
Es handelt sich bei dem Copter um meinen erst kürzlich auf DJI aufgerüsteten
Tinyhawk II Freestyle, den ich in dem Flug mit 2S betrieben habe.
Hier die Daten:
Dropbox - btfl_002.bbl - Simplify your life