
Hallo zusammen,
anbei ein für den Horus portiertes "IFR widget"
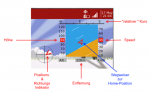
Das widget zeigt auf dem Horus Fluglage, Geschwindigkeit, Höhe und "Kurs" des Modells.
Man benötigt dazu noch einen OpenXsensor, der Gyro Werte mit überträgt.
- Quasi ein Blindfluginstrument -
Das ganze stammt von einem taranis script ab.
ich habe die Grafikroutinen angepasst und noch ein paar Änderungen vorgenommen.
Die Grafikroutinen unter lua sind noch etwas rudimentär.
Das Zeichnen (besonders Flächenfüllen) generiert enormen CPU Bedarf, daher musste das ganze in drei Routinen gesplittet werden.
Näheres dazu in der Doku, die sich im zip befindet.
Das script läuft nach Installation im demo Modus (auch ohne Sensor).
Kann dann leicht über die widget settings "scharf" geschaltet werden.
Das ganze zeigt imho ganz gut auf, was man heutzutage mit einem openSource Sensor und einer openSource Steuerung machen kann.
Anhang anzeigen IFR.zip
openXsensor Firmware, die das script unterstützt, z.B. hier:
https://fpv-community.de/showthread...ler-Einstieg&p=1006438&viewfull=1#post1006438
Gruß
Udo
anbei ein für den Horus portiertes "IFR widget"
Das widget zeigt auf dem Horus Fluglage, Geschwindigkeit, Höhe und "Kurs" des Modells.
Man benötigt dazu noch einen OpenXsensor, der Gyro Werte mit überträgt.
- Quasi ein Blindfluginstrument -
Das ganze stammt von einem taranis script ab.
ich habe die Grafikroutinen angepasst und noch ein paar Änderungen vorgenommen.
Die Grafikroutinen unter lua sind noch etwas rudimentär.
Das Zeichnen (besonders Flächenfüllen) generiert enormen CPU Bedarf, daher musste das ganze in drei Routinen gesplittet werden.
Näheres dazu in der Doku, die sich im zip befindet.
Das script läuft nach Installation im demo Modus (auch ohne Sensor).
Kann dann leicht über die widget settings "scharf" geschaltet werden.
Das ganze zeigt imho ganz gut auf, was man heutzutage mit einem openSource Sensor und einer openSource Steuerung machen kann.
Anhang anzeigen IFR.zip
openXsensor Firmware, die das script unterstützt, z.B. hier:
https://fpv-community.de/showthread...ler-Einstieg&p=1006438&viewfull=1#post1006438
Gruß
Udo
")


