
Hallöle,
dieser F4 FC 20x20 ist nie geflogen, war nur im 3" LR Projekt eingebaut.
Da ich das seltene Bedürfnis für 3 Uarts hatte (GPS, CRSF, GPS) musste ich umbauen. :-I
Er läuft einwandfrei, Betaflight 4.x ist drauf, kann nach Belieben upgedated werden.
Aktuell gibt es 4.3.1!? ;-)
Ich habe den FC ausgiebig getestet, wie er in Betaflight auf Lageänderung reagiert, sauber Motoren anfährt etc... war ja schon komplett programmiert.")
Preis: 25.- Versand inkl.
Gruss K
P.S. Ich bin kein Händler und gebe keine Garantie! Wg. Verkauf von Privat unter Ausschluss der Sachmängelhaftung. - Leider muss ich das dazu schreiben....
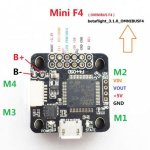


Herstellerinfos: / Eigenschaften:
Ausgestattet mit MPU6000 F4 Flugsteuerung Beschleunigung schneller Reaktion
Integriertes 5V / 1A BEC, integriertes OSD. (Diese Version ist 6DOF, kein Barometer und elektronischer Kompass)
Speziell für Mini-Drone , geeignet für die folgenden Größen von 100mm Rahmen, vor allem 80mm internen Rahmen
Entwickelt für Vierachsmodelle, eingebautes LC-Filter, BF-Firmware (Omnibus Firmware)
Die Verwendung von STM32F405RGT6 Mikrocontroller, MPU6000 Sensor, SPI Interface Anschluss, schnellere Rechengeschwindigkeit
Unterstützt 2-4S Stromversorgung
Unterstützung SBUS / PPM / DSMX und andere Mainstream-Empfänger
dieser F4 FC 20x20 ist nie geflogen, war nur im 3" LR Projekt eingebaut.
Da ich das seltene Bedürfnis für 3 Uarts hatte (GPS, CRSF, GPS) musste ich umbauen. :-I
Er läuft einwandfrei, Betaflight 4.x ist drauf, kann nach Belieben upgedated werden.
Aktuell gibt es 4.3.1!? ;-)
Ich habe den FC ausgiebig getestet, wie er in Betaflight auf Lageänderung reagiert, sauber Motoren anfährt etc... war ja schon komplett programmiert.
Preis: 25.- Versand inkl.
Gruss K
P.S. Ich bin kein Händler und gebe keine Garantie! Wg. Verkauf von Privat unter Ausschluss der Sachmängelhaftung. - Leider muss ich das dazu schreiben....
Herstellerinfos: / Eigenschaften:
Ausgestattet mit MPU6000 F4 Flugsteuerung Beschleunigung schneller Reaktion
Integriertes 5V / 1A BEC, integriertes OSD. (Diese Version ist 6DOF, kein Barometer und elektronischer Kompass)
Speziell für Mini-Drone , geeignet für die folgenden Größen von 100mm Rahmen, vor allem 80mm internen Rahmen
Entwickelt für Vierachsmodelle, eingebautes LC-Filter, BF-Firmware (Omnibus Firmware)
Die Verwendung von STM32F405RGT6 Mikrocontroller, MPU6000 Sensor, SPI Interface Anschluss, schnellere Rechengeschwindigkeit
Unterstützt 2-4S Stromversorgung
Unterstützung SBUS / PPM / DSMX und andere Mainstream-Empfänger
Zuletzt bearbeitet:

