
Hallo zusammen,
folgendes Bild zeigt was ich machen will :
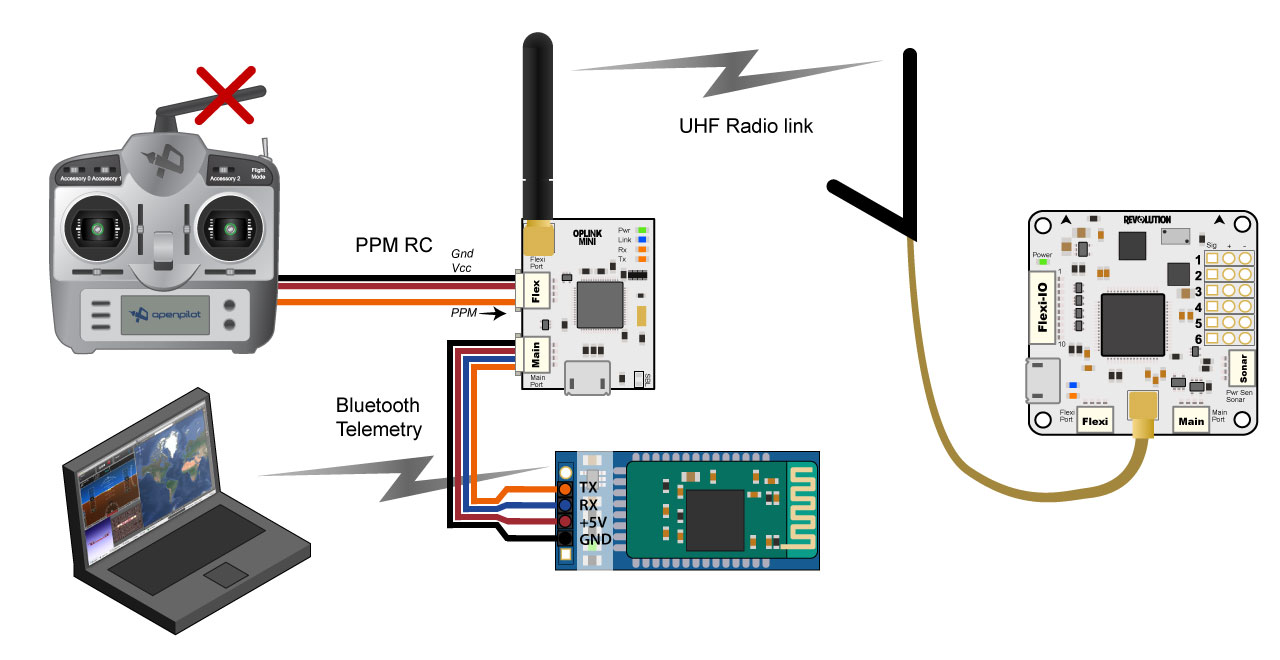
Den Copter mit dem OPlink fernsteuern und obendrein noch Telemetriedaten bekommen.
Die in Deutschland erlaubten 10mW sind natürlich nur für die Wohnstube geeignet.
Trotzdem will ich das mal versuchen.
Das Bild ist schon mal ne gute Hilfe wie die Sache zu verdrahten ist.
Allerdings fehlen noch Details.
Folgende Fragen habe ich :
1.Wie genau muss denn das PPM Signal für den Flexiport des OPlinks aussehen.
Also Amplitude ist klar (3,3Volt, möglich sollen wohl auch 5Volt sein ?)aber wierum sollen
jetzt die Impulse gerichtet sein , nach unten oder nach oben (invertiert oder nicht invertiert)?
Ich denke mal diess ist sehr wichtig für die interne MCU damit das Ganze auch funktioniert.
Das allmächtige Google hat mir dazu nichts konkretes ausgespuckt und das Wiki von OP
leider auch nicht.
2.In der GCS Software gibt es unter /Hardware ein Konfiguration der USB HID Funktion die da lautet
"RCTransmitter" . Was genau bedeutet diese Einstellung , was bewirkt sie ?
Schönes WE noch
-iswestija-
folgendes Bild zeigt was ich machen will :
Den Copter mit dem OPlink fernsteuern und obendrein noch Telemetriedaten bekommen.
Die in Deutschland erlaubten 10mW sind natürlich nur für die Wohnstube geeignet.
Trotzdem will ich das mal versuchen.
Das Bild ist schon mal ne gute Hilfe wie die Sache zu verdrahten ist.
Allerdings fehlen noch Details.
Folgende Fragen habe ich :
1.Wie genau muss denn das PPM Signal für den Flexiport des OPlinks aussehen.
Also Amplitude ist klar (3,3Volt, möglich sollen wohl auch 5Volt sein ?)aber wierum sollen
jetzt die Impulse gerichtet sein , nach unten oder nach oben (invertiert oder nicht invertiert)?
Ich denke mal diess ist sehr wichtig für die interne MCU damit das Ganze auch funktioniert.
Das allmächtige Google hat mir dazu nichts konkretes ausgespuckt und das Wiki von OP
leider auch nicht.
2.In der GCS Software gibt es unter /Hardware ein Konfiguration der USB HID Funktion die da lautet
"RCTransmitter" . Was genau bedeutet diese Einstellung , was bewirkt sie ?
Schönes WE noch
-iswestija-


