Hallo Zusammen,
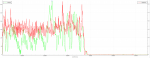
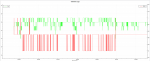
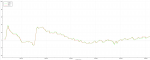
ich habe auf Basis eines UBlox M8N (das Board ist ein BN-200) und einem MS5611 (Board ist das übliche GY-63) eine Kombi aus Vario und GPS gebaut. Technisch funktioniert alles einwandfrei, die Daten kommen in OpenTX sauber an. Allerdings habe ich das Gefühl, dass die GPS Informationen extrem ungenau und deutlich verzögert ankommen. Die Geschwindigkeitswerte schwanken stark bei ruhendem Modell. Ein Trockentest "joggend ums Haus" führt zu keinen sinnvollen Werten. Mir ist absolut bewusst, dass GPS eine hohe Ungenauigkeit hat und zur Geschwindigkeitsmessung nicht ideal geeignet ist. Dennoch ist es ja durchaus technisch machbar und liefert bei einem Unisense sinnvolle(re) Werte.
Die Frage ist also: Gibt es Tuningmöglichkeiten im Code, die speziell den M8N adressieren oder sonstige Verbesserungen erzielen? In der Konfig kann ja nur sehr begrenzt etwas eingestellt werden. Die Updaterate steht auf 10Hz, GPS_SPEED_3D ist an, wobei nicht klar wird, ob das gut oder schlecht ist...
Danke im Voraus für eure Unterstützung, Gruß,
Arndt
ich habe auf Basis eines UBlox M8N (das Board ist ein BN-200) und einem MS5611 (Board ist das übliche GY-63) eine Kombi aus Vario und GPS gebaut. Technisch funktioniert alles einwandfrei, die Daten kommen in OpenTX sauber an. Allerdings habe ich das Gefühl, dass die GPS Informationen extrem ungenau und deutlich verzögert ankommen. Die Geschwindigkeitswerte schwanken stark bei ruhendem Modell. Ein Trockentest "joggend ums Haus" führt zu keinen sinnvollen Werten. Mir ist absolut bewusst, dass GPS eine hohe Ungenauigkeit hat und zur Geschwindigkeitsmessung nicht ideal geeignet ist. Dennoch ist es ja durchaus technisch machbar und liefert bei einem Unisense sinnvolle(re) Werte.
Die Frage ist also: Gibt es Tuningmöglichkeiten im Code, die speziell den M8N adressieren oder sonstige Verbesserungen erzielen? In der Konfig kann ja nur sehr begrenzt etwas eingestellt werden. Die Updaterate steht auf 10Hz, GPS_SPEED_3D ist an, wobei nicht klar wird, ob das gut oder schlecht ist...
Danke im Voraus für eure Unterstützung, Gruß,
Arndt
")