Jungs,
als alter Flächenflieger mit Bebop2 zum einfachen Rumdüsen habe ich als großer Pixhawk Fan mir einen Kopter in 250er Größe gebaut.
Verbaut ist
ein 250er Clone Rahmen Carbon mit 135g
ein Pixhawk Clone
MultiStar & Afro Combo Pack - 2206 Baby Beast V2 Motor mit 12A Afro ESC Set
6030er Propeller
ImmersionRC Sender+MinimOSD
Graupner GR-16 im SUMO Mode
Der Vogel wiegt 470g, habe einen 160g wiegenden Akku draufgeschnallt.
Am ersten Abend war ich sehr begeistert, wie einfach das Gerät "out-of-the-box" fliegt. Von Stabilize über AltHold bis Loiter+RTL gingen erstmal alle wichtigen Modi. Habe ihn dann auch ca 2 min in AutoTune fliegen lassen.
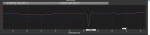
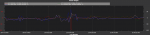
Heute wars windiger. Als ich ihn ein bisschen auf Loiter stehen ließ, schaukelte er sich im Wind derbe auf. Lt. Log ist er bis auf fast 70° Nick (bzw Pitch) gegangen (ca an Stelle20:48:40). Dachte, der schmiert mir jetzt ab. Hat sich aber gefangen.
Log:
Aktuelle Einstellungen:

Insgesamt pumpt er im Wind ziemlich, scheint zu übersteuern. Bin da vom Bebop ganz anderes gewohnt, der bei 50km/h wie angenagelt auf der Stelle steht und sehr sauber jede Böe kompensiert.
Natürlich muss es was mit dem Tuning zu tun haben. Bloß an welchem Parameter soll ich schrauben ?
Zweite Frage: Habe freie Drehregler an der Funke (MX-16). Bei meinem Heli konnte ich mir alles so programmieren, dass ich die Empfindlichkeit per Drehregler steuern konnte. Gibts die Möglichkeit beim Arducopter auch ?
Log zum Flug gibts hier als RAR:
https://www.dropbox.com/s/ehdic61xz1l7wo7/13.rar?dl=0

als alter Flächenflieger mit Bebop2 zum einfachen Rumdüsen habe ich als großer Pixhawk Fan mir einen Kopter in 250er Größe gebaut.
Verbaut ist
ein 250er Clone Rahmen Carbon mit 135g
ein Pixhawk Clone
MultiStar & Afro Combo Pack - 2206 Baby Beast V2 Motor mit 12A Afro ESC Set
6030er Propeller
ImmersionRC Sender+MinimOSD
Graupner GR-16 im SUMO Mode
Der Vogel wiegt 470g, habe einen 160g wiegenden Akku draufgeschnallt.
Am ersten Abend war ich sehr begeistert, wie einfach das Gerät "out-of-the-box" fliegt. Von Stabilize über AltHold bis Loiter+RTL gingen erstmal alle wichtigen Modi. Habe ihn dann auch ca 2 min in AutoTune fliegen lassen.
Heute wars windiger. Als ich ihn ein bisschen auf Loiter stehen ließ, schaukelte er sich im Wind derbe auf. Lt. Log ist er bis auf fast 70° Nick (bzw Pitch) gegangen (ca an Stelle20:48:40). Dachte, der schmiert mir jetzt ab. Hat sich aber gefangen.
Log:
Aktuelle Einstellungen:
Insgesamt pumpt er im Wind ziemlich, scheint zu übersteuern. Bin da vom Bebop ganz anderes gewohnt, der bei 50km/h wie angenagelt auf der Stelle steht und sehr sauber jede Böe kompensiert.
Natürlich muss es was mit dem Tuning zu tun haben. Bloß an welchem Parameter soll ich schrauben ?
Zweite Frage: Habe freie Drehregler an der Funke (MX-16). Bei meinem Heli konnte ich mir alles so programmieren, dass ich die Empfindlichkeit per Drehregler steuern konnte. Gibts die Möglichkeit beim Arducopter auch ?
Log zum Flug gibts hier als RAR:
https://www.dropbox.com/s/ehdic61xz1l7wo7/13.rar?dl=0
")