Um dem Problem weiter auf den Grund zu gehen, habe ich gestern folgendes Experiment gemacht.
Ich habe 2 AQ M4 v2 Systeme mit gleicher FW und gleichen Einstellungen für den Versuch mit GPS Antenne und SD ausgestattet.

Wichtig war mir, dass ich einen Zeitpunkt erwische an dem der K-Index nicht im grünen Bereich ist, was mir gestern am frühen Nachmittag auch gelungen ist.

Dann habe ich 1 AQ ruhig auf die Wiese gelegt den anderen AQ habe ich auf eine ca. 3m große Drehscheibe gelegt. Nun habe ich beide Systeme eingeschaltet die Drehscheibe in Bewegung gesetzt und ca. eine 3/4 Stunde die Logs aufgezeichnet dann habe ich den ruhenden AQ auf die Drehscheibe gelegt und den anderen von der Drehscheibe auf die Wiese gelegt und habe weitere 30min Logdatei aufgezeichnet.

Nun habe ich bei der Auswertung der Logfiles interessante Beobachtungen machen können.
In der Zeit in der der AQ un Bewegung ist, ist die GPS Genauigkeit (GPS_HACC und GPS_VACC) um einiges besser als wenn der AQ sich in Ruhe befindet.
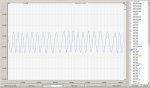
Sehr schön ist auch zu sehen, dass die GPS Positon (GPS_LON) in der Zeit der Bewegung viel genauer ist als zur Zeit der Ruhe.

sehr schön ist dabei auch die Sinusförmige Änderung von GPS_LON zur Zeit der Bewegung

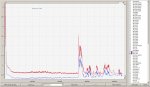
Nun hier GPS_LON vom 2. AQ welcher zuerst in Ruhe auf der Wiese lag und der dann auf die Drehscheibe kam. Hier ist ganz deutlich zu erkennen, dass in der Zeit in der der AQ sich nicht bewegt diese plötzlichen GPS Sprünge auftreten.

Meine Schlussfolgerung nun daraus, das u-blox Modul macht selbst eine Fehlerkorrektur wenn es in Bewegung ist und liefert dann exzellente Werte. Ist das Modul sprich der Kopter in Ruhe sind die Daten nicht so toll.
Gerne stelle ich Interessierten die Logs auch zur Verfügung.