Ich denke, es war mal an der Zeit einen "amtlichen" Reichweitentest mit der neuen FrSky Hardware und Firmware zu machen, damit man nicht auf anekdotische Schilderungen angewiesen ist. Seit September gibt es für den RX-Snoop ebenfalls eine neue Firmware und da war es naheliegend, die Tests zu kombinieren. @Racer240 war mein Testkollege und ist der Hardwareeigner und hat speziell für den Test noch einen Archer R4 bestellt, dazu später mehr.
Im ersten Step musste ETHOS zur Zusammenarbeit mit dem Copter bewegt werden, das hat relativ schnell geklappt.
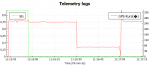
Der RX-Snoop bekommt das SBus-Signal und ein PWM-Signal von einem Servo-Pin, dann ist er glücklich. Das Kanalmapping von ACCESS hilft hier, das Dreiecksignal, das im Sender auf Kanal 8 generiert wird, auf Pin 1 zu legen.
Als Benchmark wurde mein G-RX8 mit der V1 LostFrames Schummelsoftware 191115 geflasht, ging dann aber im Rangetest mit der X9D nur auf 400m.

Hmmm, das ging schon mal besser, also die 181025 geflasht und bingo waren wieder die 700m möglich. Das will ich nicht weiter vertiefen, 400m sind natürlich auch OK.

Dann wurde auf ACCESS 2.1.7 geflasht und mit der auf ACCESS umgebauten Jumper T16 geflogen, die HF-technisch einer X9lite entspricht. Damit ging der Copter im Rangetest auf 500m, was sehr erfreulich war. RSSI und VFR% sahen auch recht erfreulich aus.
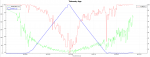
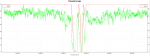
Der RX-Snoop bildet aus dem Dreiecksignal den LQP, dabei wird untersucht, ob jeder Kanalimpuls auch wirklich einen neuen Inhalt hat, oder ob es kurze Holds gibt, die für verlorene Frames stehen können. Hier verglichen mit dem LQ, der aus dem SBus LF Flaggebildet wird:

Der zweite Failsafe war direkt über meinem Kopf durch Abschirmung des Copterrahmens und den vertikalen Antennen.
Der eigentliche Test erfolgte dann in Grünstadt auf dem Modellflugplatz und ich wiederholte dort 2 mal den T16 ACCESS Flug mit dem G-RX8 im Rangetest mit einem Wegpunkt 1 km entfernt horizontal nach Westen. Etwas schlechtere Bedingungen wie an meinem heimischen Testgelände.
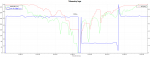
Das waren 270 und 300 m. Dann wurde der G-RX8 an die X20 gebunden und mehrmals geflogen. Leider kann ETHOS die Distanz noch nicht rechnen, deswegen wurden die Koordinaten bei Änderung des GPS-Kurses (=Failsafe) verwendet und in Google earth eingetragen und die Distanz zum Startpunkt vermessen.
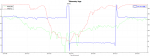

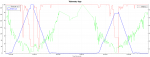
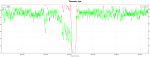
Hier noch der Snoop dazu:
Dann war der R8pro an der Reihe:
Als erstes Fazit kann man sagen, dass die X20 funktioniert. Nicht die überragende Reichweite wie ACCST V1 aber LOS allemal ausreichend. Wie fasst sich ETHOS und Tandem an? Zum Fliegen absolut OK, aber für Telemetriefreaks wie mich ist es nicht vergleichbar mit OpenTX und ACCST, da muss noch einiges ausreifen.
Wenn jemand Interesse hat, ich kann mit Logfiles um mich werfen, aber das Wesentliche ist geschrieben. Mal sehen, wenn ich wieder Lust habe, gehe ich noch auf ein paar Details ein")
Der Archer R4 war übrigens taub und hatte 10 dB weniger Empfindlichkeit. Im Rangetest war bei 70m Schluss und der Copter kam zurück. Da hat der LNA vermutlich einen Schuss. @Racer240 war das schon auf der Werkbank aufgefallen, denn statt 100 dB RSSI zeigte er nur 90 dB an. 10 dB sind 1/3 Reichweite: 70 m zu 200m -> passt wieder mal genau

Im ersten Step musste ETHOS zur Zusammenarbeit mit dem Copter bewegt werden, das hat relativ schnell geklappt.
Der RX-Snoop bekommt das SBus-Signal und ein PWM-Signal von einem Servo-Pin, dann ist er glücklich. Das Kanalmapping von ACCESS hilft hier, das Dreiecksignal, das im Sender auf Kanal 8 generiert wird, auf Pin 1 zu legen.
Als Benchmark wurde mein G-RX8 mit der V1 LostFrames Schummelsoftware 191115 geflasht, ging dann aber im Rangetest mit der X9D nur auf 400m.
Hmmm, das ging schon mal besser, also die 181025 geflasht und bingo waren wieder die 700m möglich. Das will ich nicht weiter vertiefen, 400m sind natürlich auch OK.
Dann wurde auf ACCESS 2.1.7 geflasht und mit der auf ACCESS umgebauten Jumper T16 geflogen, die HF-technisch einer X9lite entspricht. Damit ging der Copter im Rangetest auf 500m, was sehr erfreulich war. RSSI und VFR% sahen auch recht erfreulich aus.
Der RX-Snoop bildet aus dem Dreiecksignal den LQP, dabei wird untersucht, ob jeder Kanalimpuls auch wirklich einen neuen Inhalt hat, oder ob es kurze Holds gibt, die für verlorene Frames stehen können. Hier verglichen mit dem LQ, der aus dem SBus LF Flaggebildet wird:
Der zweite Failsafe war direkt über meinem Kopf durch Abschirmung des Copterrahmens und den vertikalen Antennen.
Der eigentliche Test erfolgte dann in Grünstadt auf dem Modellflugplatz und ich wiederholte dort 2 mal den T16 ACCESS Flug mit dem G-RX8 im Rangetest mit einem Wegpunkt 1 km entfernt horizontal nach Westen. Etwas schlechtere Bedingungen wie an meinem heimischen Testgelände.
Das waren 270 und 300 m. Dann wurde der G-RX8 an die X20 gebunden und mehrmals geflogen. Leider kann ETHOS die Distanz noch nicht rechnen, deswegen wurden die Koordinaten bei Änderung des GPS-Kurses (=Failsafe) verwendet und in Google earth eingetragen und die Distanz zum Startpunkt vermessen.
Hier noch der Snoop dazu:
Dann war der R8pro an der Reihe:
Als erstes Fazit kann man sagen, dass die X20 funktioniert. Nicht die überragende Reichweite wie ACCST V1 aber LOS allemal ausreichend. Wie fasst sich ETHOS und Tandem an? Zum Fliegen absolut OK, aber für Telemetriefreaks wie mich ist es nicht vergleichbar mit OpenTX und ACCST, da muss noch einiges ausreifen.
Wenn jemand Interesse hat, ich kann mit Logfiles um mich werfen, aber das Wesentliche ist geschrieben. Mal sehen, wenn ich wieder Lust habe, gehe ich noch auf ein paar Details ein
Der Archer R4 war übrigens taub und hatte 10 dB weniger Empfindlichkeit. Im Rangetest war bei 70m Schluss und der Copter kam zurück. Da hat der LNA vermutlich einen Schuss. @Racer240 war das schon auf der Werkbank aufgefallen, denn statt 100 dB RSSI zeigte er nur 90 dB an. 10 dB sind 1/3 Reichweite: 70 m zu 200m -> passt wieder mal genau
Zuletzt bearbeitet: