
Habe einen Nuri mit Arduplane ausgerüstet. MATEKSYS F405 Wing-V2 und GPS: TBS M8-2
Das GPS an Serial 3 angeschlossen. Ging schon mal. Angeschlossen über USB-Kabel. Hatte einen FIX. Jetzt nicht mehr. Da die Beschreibung Serial4 vorschlägt, habe ich umgesteckt. RX/TX gekreuzt angeschlossen.
GPS Blending (aka Dual GPS) — Plane documentation (ardupilot.org)
Ich bekomme aber kein FIX, Meldefenster "waiting for Home". Kann ich irgendwo die GPS Signale verfolgen um zu sehen, wo es hängt? Im Meldungsfenster sehe ich nichts detailliertes. Das GPS blinkt grün (ppS). also sollten Signale empfangen werden. Anzahl der Sat's? Hat das etwas damit zu tun, daß ich eine weitere serielle Schnittstelle mit einem WIFI- Modul belegt habe? Ich möchte vom USB-Kabel wegkommen.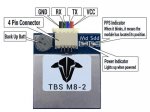
Das GPS an Serial 3 angeschlossen. Ging schon mal. Angeschlossen über USB-Kabel. Hatte einen FIX. Jetzt nicht mehr. Da die Beschreibung Serial4 vorschlägt, habe ich umgesteckt. RX/TX gekreuzt angeschlossen.
GPS Blending (aka Dual GPS) — Plane documentation (ardupilot.org)
Ich bekomme aber kein FIX, Meldefenster "waiting for Home". Kann ich irgendwo die GPS Signale verfolgen um zu sehen, wo es hängt? Im Meldungsfenster sehe ich nichts detailliertes. Das GPS blinkt grün (ppS). also sollten Signale empfangen werden. Anzahl der Sat's? Hat das etwas damit zu tun, daß ich eine weitere serielle Schnittstelle mit einem WIFI- Modul belegt habe? Ich möchte vom USB-Kabel wegkommen.
Zuletzt bearbeitet:
")


