
EvvGC - 3/2axis Brushless Gimbal Controller (Open Source) - Erfahrungen?
- Themenstarter JUERGEN_
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Danke Euch beiden. Damit weiss ich zumindest, dass es hier evtl Hilfe gibt. Jetzt erstmal löten und schmökern ")
Hab mir eh erst das Teil bestellt, um mit dem pc zu kommunizieren...
Hmmm steuerbares netzteil sieht schonmal schlecht aus... Bin ja mal gespannt ob ich irgendwas gebacken bekomme.
Siehts denn mit eunem 1.3er wirklich einfacher aus? Oder gleich teurer in ein martinez oder sonstigen 3-achs-controller?
Hab mir eh erst das Teil bestellt, um mit dem pc zu kommunizieren...
Hmmm steuerbares netzteil sieht schonmal schlecht aus... Bin ja mal gespannt ob ich irgendwas gebacken bekomme.
Siehts denn mit eunem 1.3er wirklich einfacher aus? Oder gleich teurer in ein martinez oder sonstigen 3-achs-controller?
Ne 1.2 und 1.3 macht keinen großen Unterschied, bis auf das du wenn du USB (nicht UART1) anschließt noch ne externe Stromversorgung brauchst... achja bei dem FDTI drauf achten, dass es wirklich 3.3v hat. Meiner hatte nämlich 5v obwohl 3.3v drauf stand. Wie auch immer stecke auch grad fest xd aber gimbal sieht cool aus
Anhänge
-
 91,4 KB Aufrufe: 41
91,4 KB Aufrufe: 41
Zuletzt bearbeitet:
Ich weis nicht ob das schon mal gepostet wurde aber die V1.2 ist bei DX jetzt für nicht mal 20€ zu haben: http://dx.com/p/evvgc-3-axis-gimbal-controller-v1-2-wdc-dc-with-sensor-257902
Grüße,
Felix
Grüße,
Felix
Das hat nichts mit Motorgröße zu tun...
Du weist doch, nicht die Größe ist wichtig, die Technik macht´s
Bedenkenlos geht bei sowas auch schon mal gar nichts
Aber wenn die Bedenken dann weniger geworden sind, weil man es hin bekommen hat, das das Teil sicher mit wenig Strom läuft, würde ich trotzdem nicht mehr als 500mA Dauer/Motor ohne Kühlkörper über die Platine schieben.
Also einfach langsam ran tasten...
Und wenn nötig Kühlkörper drauf machen oder die Endstufe mir größeren FET neu aufbauen, siehe weiter oben.
Daumenwert:
Auslegungsstrom 1A/Kg Kamera, was Man dann wirklich braucht hängt aber stark vom Gimbal, Motoren usw. ab.
Und wenn es Dich beruhigt:
http://www.rcgroups.com/forums/showpost.php?p=25152652&postcount=217
Du weist doch, nicht die Größe ist wichtig, die Technik macht´s
Bedenkenlos geht bei sowas auch schon mal gar nichts
Aber wenn die Bedenken dann weniger geworden sind, weil man es hin bekommen hat, das das Teil sicher mit wenig Strom läuft, würde ich trotzdem nicht mehr als 500mA Dauer/Motor ohne Kühlkörper über die Platine schieben.
Also einfach langsam ran tasten...
Und wenn nötig Kühlkörper drauf machen oder die Endstufe mir größeren FET neu aufbauen, siehe weiter oben.
Daumenwert:
Auslegungsstrom 1A/Kg Kamera, was Man dann wirklich braucht hängt aber stark vom Gimbal, Motoren usw. ab.
Und wenn es Dich beruhigt:
http://www.rcgroups.com/forums/showpost.php?p=25152652&postcount=217
Kann man pitch roll und yaw des Gimbals eigentlich auch über die RC-Anlage direkt ansteuern?
Eingänge sind auf der Platine so weit ich das erkennen kann vorhanden, finde im Netz aber irgendwie keine Informationen darüber...
Eingänge sind auf der Platine so weit ich das erkennen kann vorhanden, finde im Netz aber irgendwie keine Informationen darüber...
So, mein USB Konverter ist da. Angeschlossen wie auf rcgroups beschrieben, BOOT0 und NRST mit Kabel gejumpert und... schon gehts nicht weiter.
Lasse ich beide Jumper weg, blinkt wenigstens eine LED auf dem Board und ich kann in der Flash Demo auf COM4 stellen. Hab ich erst beide drauf, stecke an, starte die Software und entferne dann den NRST gehts nicht weiter... da leuchtet auch nix. Dann kann ich die Jumper auch runter nehmen und nix weiter passiert. Steck ich ohne an, leuchtets wenigstens...Bin ich zu doof?
Lasse ich beide Jumper weg, blinkt wenigstens eine LED auf dem Board und ich kann in der Flash Demo auf COM4 stellen. Hab ich erst beide drauf, stecke an, starte die Software und entferne dann den NRST gehts nicht weiter... da leuchtet auch nix. Dann kann ich die Jumper auch runter nehmen und nix weiter passiert. Steck ich ohne an, leuchtets wenigstens...Bin ich zu doof?
So, mein USB Konverter ist da. Angeschlossen wie auf rcgroups beschrieben, BOOT0 und NRST mit Kabel gejumpert und... schon gehts nicht weiter.
Lasse ich beide Jumper weg, blinkt wenigstens eine LED auf dem Board und ich kann in der Flash Demo auf COM4 stellen. Hab ich erst beide drauf, stecke an, starte die Software und entferne dann den NRST gehts nicht weiter... da leuchtet auch nix. Dann kann ich die Jumper auch runter nehmen und nix weiter passiert. Steck ich ohne an, leuchtets wenigstens...Bin ich zu doof?
Lasse ich beide Jumper weg, blinkt wenigstens eine LED auf dem Board und ich kann in der Flash Demo auf COM4 stellen. Hab ich erst beide drauf, stecke an, starte die Software und entferne dann den NRST gehts nicht weiter... da leuchtet auch nix. Dann kann ich die Jumper auch runter nehmen und nix weiter passiert. Steck ich ohne an, leuchtets wenigstens...Bin ich zu doof?
Hi, ich hab das 1.2er. Er gibt so 3,36-3,37 aus... danke, bin grad voll ratlos. Aber die FPV1 Controllerversion ist mir derzzeit einfach vieel zu teuer...
noch eine Frage. Im Moment is da noch garnix drauf? Ich kapier echt grad null. alleine die Verbindung zum Zusatzcontroller erschliesst sich mir nicht, hab ich einen falschen Stecker von GLB bekommen? Kann Jemand zufällig mal Detailfotos der Verkalbelung machen?
Man, ich neeewwwbie- da ärger ich mich echt über mich.... ich check null
noch eine Frage. Im Moment is da noch garnix drauf? Ich kapier echt grad null. alleine die Verbindung zum Zusatzcontroller erschliesst sich mir nicht, hab ich einen falschen Stecker von GLB bekommen? Kann Jemand zufällig mal Detailfotos der Verkalbelung machen?
Man, ich neeewwwbie- da ärger ich mich echt über mich.... ich check null
Zuletzt bearbeitet:
Hi, ich hab das 1.2er. Er gibt so 3,36-3,37 aus... danke, bin grad voll ratlos. Aber die FPV1 Controllerversion ist mir derzzeit einfach vieel zu teuer...
noch eine Frage. Im Moment is da noch garnix drauf? Ich kapier echt grad null. alleine die Verbindung zum Zusatzcontroller erschliesst sich mir nicht, hab ich einen falschen Stecker von GLB bekommen? Kann Jemand zufällig mal Detailfotos der Verkalbelung machen?
Man, ich neeewwwbie- da ärger ich mich echt über mich.... ich check null
noch eine Frage. Im Moment is da noch garnix drauf? Ich kapier echt grad null. alleine die Verbindung zum Zusatzcontroller erschliesst sich mir nicht, hab ich einen falschen Stecker von GLB bekommen? Kann Jemand zufällig mal Detailfotos der Verkalbelung machen?
Man, ich neeewwwbie- da ärger ich mich echt über mich.... ich check null
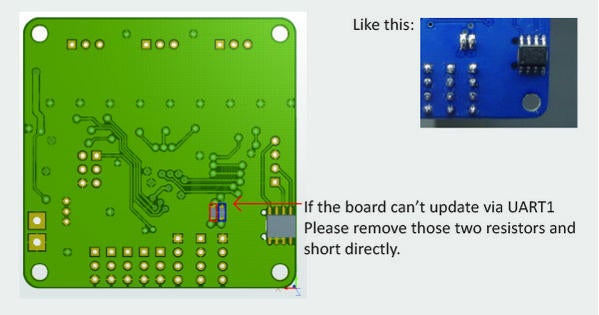
Hier steht nen Tipp fürs 1.2 board. Wenn es nicht funktioniert sollst du die beiden Resistoren entfernen und direkt überbrücken.
Hi, danke für den Tip- das probier ich. Müssen die irgendwann wieder dran?
Achja, gerade nochmal fürs 1.2 board durchgelesen. Die hat keine Power LED, d.h. du wirst erst eine LED sehen, wenn die Firmware drauf ist.
1.Install "Flash Loader Demonstrator" http://www.st.com/web/en/catalog/tools/PF257525 (v2.6)
2.Disconnect all motors and power supply(battery) from controller.
3.Put Jumper on BOOT0 and NRST!! (marked B and R on the 1.3 board)
4.Connect "USB To COM" converter to USART1 port. GND to GND, 3.3v to 3.3v, RX to TX, TX to RX. (CP2102 converter is perfect for that, also it has 3,3v output, and it is cheap) NOTE that some CP2102 boards has swapped RX and TX labels. If you have one of these, it will be RX to RX and TX to TX.
5.Connect converter to USB and open "Flash Loader Demonstrator"
6.Select your COM port and BR=115200
7.Disconnect NRST
8. press Next>Next>Next>Select HEX file from project directory>Next
9.If successful, disconnect USART1, connect motors and supply.
2.Disconnect all motors and power supply(battery) from controller.
3.Put Jumper on BOOT0 and NRST!! (marked B and R on the 1.3 board)
4.Connect "USB To COM" converter to USART1 port. GND to GND, 3.3v to 3.3v, RX to TX, TX to RX. (CP2102 converter is perfect for that, also it has 3,3v output, and it is cheap) NOTE that some CP2102 boards has swapped RX and TX labels. If you have one of these, it will be RX to RX and TX to TX.
5.Connect converter to USB and open "Flash Loader Demonstrator"
6.Select your COM port and BR=115200
7.Disconnect NRST
8. press Next>Next>Next>Select HEX file from project directory>Next
9.If successful, disconnect USART1, connect motors and supply.
Hallo,
Falls es jemand noch nicht mitbekommen hat, es gibt (mal wieder) eine neue Firmware für das EvvGc Board.
Die Firmware nennt sich "EvvGc Plus" und enthält folgende Features:
1.Effiziente High-res Motorsteuerung.
2.Vollwerige PID, sowie I-PD Regelung.
3.Quaternion basierter Lagevorhersage Algorithmus(hoffentlich richtig übersetzt!?).
4.Sensorausrichtung frei konfigurierbar.
5.USB Massenspeicher Bootloader(schnelles austauschen der Firmware möglich).
6.Graphical user interface (GUI).
Ich hab die Firmware schon ausprobiert und bin begeistert. Es lässt sich alles Mögliche einstellen. Sensorrichtung, Pwm/analog Input, Followmode. Deadtime der FETs uvm. Es sieht wirklich vielversprechend aus.
LINK zu RCgroups - EvvGc Plus Firmware
Falls es jemand noch nicht mitbekommen hat, es gibt (mal wieder) eine neue Firmware für das EvvGc Board.
Die Firmware nennt sich "EvvGc Plus" und enthält folgende Features:
1.Effiziente High-res Motorsteuerung.
2.Vollwerige PID, sowie I-PD Regelung.
3.Quaternion basierter Lagevorhersage Algorithmus(hoffentlich richtig übersetzt!?).
4.Sensorausrichtung frei konfigurierbar.
5.USB Massenspeicher Bootloader(schnelles austauschen der Firmware möglich).
6.Graphical user interface (GUI).
Ich hab die Firmware schon ausprobiert und bin begeistert. Es lässt sich alles Mögliche einstellen. Sensorrichtung, Pwm/analog Input, Followmode. Deadtime der FETs uvm. Es sieht wirklich vielversprechend aus.
LINK zu RCgroups - EvvGc Plus Firmware
Zuletzt bearbeitet:
- Status
- Nicht offen für weitere Antworten.

