CamperHB: Du hast recht, der 17x5.5 war als Pusher sehr schlecht, der hatte alleine nur ca. 350g Schub produziert. Ich kann das selber kaum glaub, aber ich hatte 5x draufgeschaut und keinen Fehler entdeckt. Ich könnte mir denken, dass das tatsächlich an der komischen Form liegt. Aber das wäre bei Gelegenheit nochmal zu prüfen. Und das Ergebnis war spezifisch für den 17x5.5, die anderen haben ja ganz anders ausgesehen.
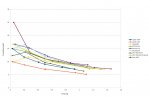
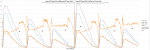
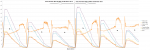
Basti: Hier sind die Rohdaten der Testläufe. Viel Spass beim Rechnen. Wenn Du da was schönes Rausrechnen kannst, würden wir uns bestimmt freuen, wenn Du das wieder hier reinstellst")
Fdietsch:
Gleich- zu Gegenläufig hatte ich auf Basis der Kombi 5010-14 340kv mit RCTimer 17x55 mal verglichen, hier: http://fpv-community.de/showthread.php?32248-BamV12-Baubericht&p=531110&viewfull=1#post531110. Nach den letzten Messungen ist das natürlich ein ziemliches doofes Setup für so einen Vergleich
Der Link zum Code ist gerade offline, weil ich die Domäne gerade umziehe und die DNS Einträge versaut hatte. Wird die Tage wieder wieder korrigiert.
Hornet: Die Props sind heute gekommen, danke schonmal. Bin noch nicht dazu gekommen, sie auszupacken.
Rohdaten der Messungen kommen gleich
Basti: Hier sind die Rohdaten der Testläufe. Viel Spass beim Rechnen. Wenn Du da was schönes Rausrechnen kannst, würden wir uns bestimmt freuen, wenn Du das wieder hier reinstellst
Fdietsch:
Gleich- zu Gegenläufig hatte ich auf Basis der Kombi 5010-14 340kv mit RCTimer 17x55 mal verglichen, hier: http://fpv-community.de/showthread.php?32248-BamV12-Baubericht&p=531110&viewfull=1#post531110. Nach den letzten Messungen ist das natürlich ein ziemliches doofes Setup für so einen Vergleich
Der Link zum Code ist gerade offline, weil ich die Domäne gerade umziehe und die DNS Einträge versaut hatte. Wird die Tage wieder wieder korrigiert.
Hornet: Die Props sind heute gekommen, danke schonmal. Bin noch nicht dazu gekommen, sie auszupacken.
Rohdaten der Messungen kommen gleich
Zuletzt bearbeitet: