
Ich habe kürzlich einen faltbaren Quadrocopter für FPV gebaut: Den KlappQuad.

Der Copter wurde in der Grundform vom FQuad inspiriert. Ich habe vorher einen FQuad geflogen und mag diese Bauform sehr gerne. Allerdings wollte ich unbedingt einen faltbaren Copter. Nicht nur weil ein starrer Quad beim Transport im Auto (und sonst) immer recht sperrig ist, sondern weil ich mir auch die Option offen halten wollte, das Teil zB. auch mal im Zug mit zu nehmen.
Hinzu kam, dass ich an das Teil einen BL Gimbal bauen wollte und ich hierfür beim FQuad ohne massive Änderungen keine vernünftige Befestigungsmöglichkeit gehabt hätte.
Ich habe den KlappQuad komplett aus Holz aufgebaut. Nach wie vor bin ich der Meinung, dass kaum was an Holz herankommt, sei es in Bearbeitungsfähigkeit, Festigkeit und Gewicht.
Der Rahmen besteht aus 3 Platten (2mm Flugzeugsperrholz), die alle den selben Grundriss haben. Die beiden unteren Platten bilden den starren Teil des Rahmen und halten sowohl die 4 Arme als auch das Landegestell. Bedingt durch den Querschnitt der Arme (Buche-Leisten, 10x10mm) haben die Platten 10mm Abstand. Damit ich trotzdem den Stromsensor des EZ OSD dazwischen bekomme habe ich aus der oberen der beiden Platten einen entsprechenden Ausschnitt herausgefräßt.

Auf die obere, starre Platte kommen dann der AV-Sender (die Halterung kommt aus meinem 3D-Drucker), der Flightcontroller (Naza Lite), sowie der RC-Empfänger (FrSky X8R). Mit der Lage der beiden X8R-Antennen bin ich noch nicht wirklich zufrieden. Allerdings gab es ansonsten keine Möglichkeit die beiden nervigen Plastikklötze irgendwo zu befestigen ohne die Faltbarkeit des Copters zu beeinträchtigen (kann man diese Plastikgewichte eigentlich irgendwie loswerden, ohne dass die Empfangsleistung der X8R beeinträchtigt wird, oder sind die mehr als nur Produktdesign?)

Ansonsten sitzen zwischen diesen beiden Platten nur noch die beiden ESCs für die hinteren Motore, sowie die Stromkabel für die beiden vorderen ESCs. Die ESCs für die vorderen Motoren sind an der Unterseite des Copters angebracht (siehe weiter unten).
Die dritte Platte des Rahmens wird mittels weicher Gummi-Distanzhalter auf den starren Rahmen geschraubt.

Diese Platte dient der Vibrationsentkopplung für die Kamera. Am vorderen Ende ist der Gimbal angeschraubt (es handelt sich hierbei um einen stark modifizierten China-Gimbal für meine GoPro Hero 1). Dahinter sitzt die Steuerplatine für den Gimbal (Open Source Brushless Gimbal Controller).
Außerdem sind auf der oberen Platte die GPS-Antenne der Naza Lite, sowie das EZ OSD angebracht. Beide weniger wegen einer Vibrationsentkopplung als mehr der Notwendigkeit, freie Sicht zum Himmel zu haben (GPS-Empfang...).
Am hinteren Ende ist schließlich Platz für den LiPo, den ich einfach mittels Klettverschluss auf dem Copter anbringe.
Da dies ein FPV-Copter ist und daher keine 3D-Manöver zu erwarten sind, reicht meiner Erfahrung nach eine Befestigung des LiPos mit einem einfachen Klettverschluss (auf der Oberseite des Copters!) völlig aus.
Um den KlappQuad im zusammengelegten Zustand so flach wie möglich zu machen, habe ich mir für die Naza-GPS-Antenne eine klappbare Halterung gebaut. Es gibt meines Wissens ähnliche Halterungen auch fertig zu kaufen, ich habe mir meine aber aus etwas Messing-Rundmaterial auf meiner Drehbank selbst gebaut. Das Ganze hat ca. 2h gedauert (ich bin etwas außer Übung, war aber froh, endlich mal wieder etwas sinnvolles auf der Drehbank basteln zu können). Der Vorteil meiner Eigenkonstruktion: Die Montage kann mittels einem einfachen 3mm-Loch in der Platte erfolgen. Ist die Mutter richtig festgezogen, dreht sich da nichts mehr. Gewichtsmäßig hält sich das Ganze auch in Grenzen: die 3-teilige Messinghalterung wiegt 6 Gramm (der dadurch weggefallene, original Naza Antennenfuß aus Alu wiegt übrigens 3 Gramm). Denkbar wäre natürlich auch, die Halterung aus Alu zu drehen, allerdings hatte ich kein geeignetes Rohmaterial rumliegen.


Die Faltbarkeit des KlappQuad geht über das einfache "Ohrenanlegen" (d.h. Zurückklappen der Arme) hinaus:
Zusätzlich zum Rotieren der Arme, können die hinteren Arme noch im Rahmen versenkt werden. Die Gesamtlänge des zusammengelegten KlappQuad verringert sich dadurch erheblich.
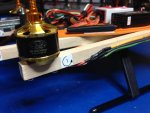
Dieser Klappmechanismus wird dadurch ermöglicht, dass die hinteren Arme nicht durch eine übliche, einfache Drehachse gelagert sind (wie die vorderen Arme), sondern über eine gefräste Nut auf der Unterseite der Arme.

Diese Nut läuft auf dem Kopf einer Schraube und ermöglicht somit nicht nur die Drehung des Arms, sondern auch ein Verschieben über die gefräste Länge.
Im ausgeklappten Zustand des Arms wird dieser durch eine zweite Nut am Ende des Arms (und einen zweiten Schraubenkopf im Inneren des Rahmens) gehen versehentliches Verdrehen fixiert. Diese zweite Nut am inneren Ende des Arms ist im zusammengeklappten Zustand am vorderen Ende des KlappQuad zu sehen.

(Auf diesem Bild sieht man auch die beiden ESCs für die vorderen Motoren an der Unterseite des Copters.)
Durch diese Konstruktion lässt sich der KlappQuad innerhalb weniger Sekunden auf- bzw. zusammenklappen, ohne dass hierfür geschraubt werden muss oder sonst irgend welches Werkzeug nötig wäre.
Die Motoren sind direkt auf die Arme geschraubt. Da alle vier Arme beim Zusammenklappen teilweise im Rahmen versenkt werden, können die Stromkabel für die Motoren nicht, wie üblich, mit Kabelbindern an den Armen befestigt werden. Statt dessen habe ich an jedem Arm quer zwei paar kleine Löcher (je 1mm Durchmesser) gebohrt und die Leitungen mit Hilfe von 0,8mm Silberdraht seitlich an den Armen fixiert.
Hier ein paar Bilder von verschiedenen Phasen des Auf-/Zusammenklappens:

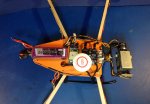
(Zusammengeklappt)
(Rechter hinterer Arm aus dem Rahmen auf volle Länge herausgezogen)
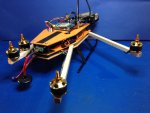
(Teilweise aufgefaltet)

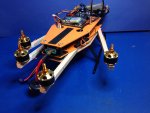
(Komplett aufgefaltet)






Hier noch ein paar technische Rahmendaten:
Maße, zusammengeklappt (L x B x H): 47 x 14 x 14 cm (incl. Props) bzw. 36,5 x 14 x 14 cm (ohne Props)
Motoren: Scorpion SII-2208 1050KV mit 9x5 Props
ESCs: Turnigy Plush 10A (original Firmware)
Flightcontroller: Naza Lite
OSD: Immersion RC EZ OSD incl. Strommesser
AV: Fatshark 5,8GHz
RC: FrSky X8R (Taranis)
Gewicht (flugfertig, incl. GoPro Hero 1 und 3s 2400mAh LiPo): 1150g
Werden die Propeller abgeschraubt, passt der KlappQuad, Funke, Lipos und sonstiges Zubehör, zusätzlich zu ein paar Klamotten, locker in einen kleine Koffer (Handgepäckgröße) und eignet sich somit auch wunderbar als Reisecopter. Ich hab's vergangenen Wochenende bei einem Kurztripp in die Schweiz ausprobiert. Hat super funktioniert!
Ach ja: Fliegen kann der KlappQuad übrigens auch. Ich habe zwar keine "Außen-Aufnahmen" vom KlappQuad selbst, aber folgender Film ist komplett per FPV mit dem KlappQuad aufgenommen.
Ich hatte es mit einem Freund davon, ob man mit einem FPV-Copter wohl auch "Action-Szenen" für eine Film aufnehmen könnte. Wir haben es dann einfach mal probiert")
Netterweise hat mein Kumpel mit seinem Sohn als "Schauspieler" geholfen...
http://www.youtube.com/watch?v=QbnuA8ObqJU
Der Copter wurde in der Grundform vom FQuad inspiriert. Ich habe vorher einen FQuad geflogen und mag diese Bauform sehr gerne. Allerdings wollte ich unbedingt einen faltbaren Copter. Nicht nur weil ein starrer Quad beim Transport im Auto (und sonst) immer recht sperrig ist, sondern weil ich mir auch die Option offen halten wollte, das Teil zB. auch mal im Zug mit zu nehmen.
Hinzu kam, dass ich an das Teil einen BL Gimbal bauen wollte und ich hierfür beim FQuad ohne massive Änderungen keine vernünftige Befestigungsmöglichkeit gehabt hätte.
Ich habe den KlappQuad komplett aus Holz aufgebaut. Nach wie vor bin ich der Meinung, dass kaum was an Holz herankommt, sei es in Bearbeitungsfähigkeit, Festigkeit und Gewicht.
Der Rahmen besteht aus 3 Platten (2mm Flugzeugsperrholz), die alle den selben Grundriss haben. Die beiden unteren Platten bilden den starren Teil des Rahmen und halten sowohl die 4 Arme als auch das Landegestell. Bedingt durch den Querschnitt der Arme (Buche-Leisten, 10x10mm) haben die Platten 10mm Abstand. Damit ich trotzdem den Stromsensor des EZ OSD dazwischen bekomme habe ich aus der oberen der beiden Platten einen entsprechenden Ausschnitt herausgefräßt.
Auf die obere, starre Platte kommen dann der AV-Sender (die Halterung kommt aus meinem 3D-Drucker), der Flightcontroller (Naza Lite), sowie der RC-Empfänger (FrSky X8R). Mit der Lage der beiden X8R-Antennen bin ich noch nicht wirklich zufrieden. Allerdings gab es ansonsten keine Möglichkeit die beiden nervigen Plastikklötze irgendwo zu befestigen ohne die Faltbarkeit des Copters zu beeinträchtigen (kann man diese Plastikgewichte eigentlich irgendwie loswerden, ohne dass die Empfangsleistung der X8R beeinträchtigt wird, oder sind die mehr als nur Produktdesign?)
Ansonsten sitzen zwischen diesen beiden Platten nur noch die beiden ESCs für die hinteren Motore, sowie die Stromkabel für die beiden vorderen ESCs. Die ESCs für die vorderen Motoren sind an der Unterseite des Copters angebracht (siehe weiter unten).
Die dritte Platte des Rahmens wird mittels weicher Gummi-Distanzhalter auf den starren Rahmen geschraubt.
Diese Platte dient der Vibrationsentkopplung für die Kamera. Am vorderen Ende ist der Gimbal angeschraubt (es handelt sich hierbei um einen stark modifizierten China-Gimbal für meine GoPro Hero 1). Dahinter sitzt die Steuerplatine für den Gimbal (Open Source Brushless Gimbal Controller).
Außerdem sind auf der oberen Platte die GPS-Antenne der Naza Lite, sowie das EZ OSD angebracht. Beide weniger wegen einer Vibrationsentkopplung als mehr der Notwendigkeit, freie Sicht zum Himmel zu haben (GPS-Empfang...).
Am hinteren Ende ist schließlich Platz für den LiPo, den ich einfach mittels Klettverschluss auf dem Copter anbringe.
Da dies ein FPV-Copter ist und daher keine 3D-Manöver zu erwarten sind, reicht meiner Erfahrung nach eine Befestigung des LiPos mit einem einfachen Klettverschluss (auf der Oberseite des Copters!) völlig aus.
Um den KlappQuad im zusammengelegten Zustand so flach wie möglich zu machen, habe ich mir für die Naza-GPS-Antenne eine klappbare Halterung gebaut. Es gibt meines Wissens ähnliche Halterungen auch fertig zu kaufen, ich habe mir meine aber aus etwas Messing-Rundmaterial auf meiner Drehbank selbst gebaut. Das Ganze hat ca. 2h gedauert (ich bin etwas außer Übung, war aber froh, endlich mal wieder etwas sinnvolles auf der Drehbank basteln zu können). Der Vorteil meiner Eigenkonstruktion: Die Montage kann mittels einem einfachen 3mm-Loch in der Platte erfolgen. Ist die Mutter richtig festgezogen, dreht sich da nichts mehr. Gewichtsmäßig hält sich das Ganze auch in Grenzen: die 3-teilige Messinghalterung wiegt 6 Gramm (der dadurch weggefallene, original Naza Antennenfuß aus Alu wiegt übrigens 3 Gramm). Denkbar wäre natürlich auch, die Halterung aus Alu zu drehen, allerdings hatte ich kein geeignetes Rohmaterial rumliegen.
Die Faltbarkeit des KlappQuad geht über das einfache "Ohrenanlegen" (d.h. Zurückklappen der Arme) hinaus:
Zusätzlich zum Rotieren der Arme, können die hinteren Arme noch im Rahmen versenkt werden. Die Gesamtlänge des zusammengelegten KlappQuad verringert sich dadurch erheblich.
Dieser Klappmechanismus wird dadurch ermöglicht, dass die hinteren Arme nicht durch eine übliche, einfache Drehachse gelagert sind (wie die vorderen Arme), sondern über eine gefräste Nut auf der Unterseite der Arme.
Diese Nut läuft auf dem Kopf einer Schraube und ermöglicht somit nicht nur die Drehung des Arms, sondern auch ein Verschieben über die gefräste Länge.
Im ausgeklappten Zustand des Arms wird dieser durch eine zweite Nut am Ende des Arms (und einen zweiten Schraubenkopf im Inneren des Rahmens) gehen versehentliches Verdrehen fixiert. Diese zweite Nut am inneren Ende des Arms ist im zusammengeklappten Zustand am vorderen Ende des KlappQuad zu sehen.
(Auf diesem Bild sieht man auch die beiden ESCs für die vorderen Motoren an der Unterseite des Copters.)
Durch diese Konstruktion lässt sich der KlappQuad innerhalb weniger Sekunden auf- bzw. zusammenklappen, ohne dass hierfür geschraubt werden muss oder sonst irgend welches Werkzeug nötig wäre.
Die Motoren sind direkt auf die Arme geschraubt. Da alle vier Arme beim Zusammenklappen teilweise im Rahmen versenkt werden, können die Stromkabel für die Motoren nicht, wie üblich, mit Kabelbindern an den Armen befestigt werden. Statt dessen habe ich an jedem Arm quer zwei paar kleine Löcher (je 1mm Durchmesser) gebohrt und die Leitungen mit Hilfe von 0,8mm Silberdraht seitlich an den Armen fixiert.
Hier ein paar Bilder von verschiedenen Phasen des Auf-/Zusammenklappens:
(Zusammengeklappt)
(Rechter hinterer Arm aus dem Rahmen auf volle Länge herausgezogen)
(Teilweise aufgefaltet)
(Komplett aufgefaltet)
Hier noch ein paar technische Rahmendaten:
Maße, zusammengeklappt (L x B x H): 47 x 14 x 14 cm (incl. Props) bzw. 36,5 x 14 x 14 cm (ohne Props)
Motoren: Scorpion SII-2208 1050KV mit 9x5 Props
ESCs: Turnigy Plush 10A (original Firmware)
Flightcontroller: Naza Lite
OSD: Immersion RC EZ OSD incl. Strommesser
AV: Fatshark 5,8GHz
RC: FrSky X8R (Taranis)
Gewicht (flugfertig, incl. GoPro Hero 1 und 3s 2400mAh LiPo): 1150g
Werden die Propeller abgeschraubt, passt der KlappQuad, Funke, Lipos und sonstiges Zubehör, zusätzlich zu ein paar Klamotten, locker in einen kleine Koffer (Handgepäckgröße) und eignet sich somit auch wunderbar als Reisecopter. Ich hab's vergangenen Wochenende bei einem Kurztripp in die Schweiz ausprobiert. Hat super funktioniert!
Ach ja: Fliegen kann der KlappQuad übrigens auch. Ich habe zwar keine "Außen-Aufnahmen" vom KlappQuad selbst, aber folgender Film ist komplett per FPV mit dem KlappQuad aufgenommen.
Ich hatte es mit einem Freund davon, ob man mit einem FPV-Copter wohl auch "Action-Szenen" für eine Film aufnehmen könnte. Wir haben es dann einfach mal probiert
Netterweise hat mein Kumpel mit seinem Sohn als "Schauspieler" geholfen...
http://www.youtube.com/watch?v=QbnuA8ObqJU
Zuletzt bearbeitet:



