Hi, ich bin im Moment dabei ein 3 Achs Gimbal für die GoPro zu entwerfen. Damit sich die Yaw-Achse auch über 360 Grad drehen lässt, wird ein Schleifring eingesetzt. Das Gimbal wurde so entworfen, dass keine Kabel zu sehen sind.
Gedruckt wird das ganze per SLS Verfahren bei shapeways.
Die IMU und der LiveOut USB Stecker werden in die GoPro Aufnahme integriert.
Die STL Dateien könnt ihr euch bei Thingiverse genauer anschauen und bei Bedarf runterladen.
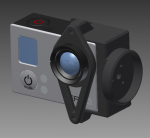
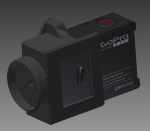
Hie findet ihr noch ein 3D Rendering des Gimbals(vielen Dank an hexacopter dafür):
3D Rendering
Die maximale Betriebsspannung ist 12V, bei einer höheren Spannung kann es zu I2C Fehlern kommen
Bilder:
Anhang anzeigen 102201 Anhang anzeigen 102166
Videos:
[video=youtube;U1MQhgwNTXE]http://www.youtube.com/watch?v=U1MQhgwNTXE[/video]
[video=youtube;MqzCWpC_oaw]http://www.youtube.com/watch?v=MqzCWpC_oaw#t=165[/video]
Elektronische Komponenten:
Nick-Motor: BGM2208-80 (Goodluckbuy) (foxtechfpv) (Premium-Modellbau)
Roll-Motor: BGM2208-80 (Goodluckbuy) (foxtechfpv) (Premium-Modellbau)
Yaw-Motor: BGM2804 (Goodluckbuy) (RCTimer)
Schleifring: Slipringer 12 pol (Goodluckbuy)
GoPro Live-Out: Tarot TL68A10 (Goodluckbuy)
Controller: STorM32BGC (Gimbal24) (Witespyquad)
3D-Druckteile:
Gesamtes Gimbal (für IMU von Witespyquad)
GoPro Aufnahme (für IMU von Witespyquad)
IMU Abdeckung (für IMU von Witespyquad)
Achtung, mit der hier verwendeten IMU kommt es evtl. zu I2C Fehlern
Gesamtes Gimbal (für IMU von Gimbal24/Motor mit drei Bohrungen)
Gesamtes Gimbal (für IMU von Gimbal24/Motor mit vier Bohrungen)
GoPro Aufnahme (für IMU von Gimbal24/Motor mit drei Bohrung)
GoPro Aufnahme (für IMU von Gimbal24/Motor mit vier Bohrung)
IMU Abdeckung (für IMU von Gimbal24)
Arm Nick-Roll (Für Motor mit drei Bohrungen)
Arm Nick-Roll (Für Motor mit vier Bohrungen)
GoPro Befestigung
Arm Yaw-Roll
Dämpfung
Dämpfung Deckel
Dämpfung Arm
Sonstiges:
Selbstklebende Kupferfolie
M2x6 Linsenkopf (Pitch-Motor)
M2x10 & M2x6 Senkkopf (Roll-Motor/IMU-Abdeckung)
M3x10 & M3x8 & M3x16 Senkkopf (Pitch-Motor/Roll-Motor/Yaw-Motor/Controller Deckel)
M3x10 Linsenkopf (Gopro Befestigung)
M3x8 Distanzbolzen
Hier eine kurze Anleitung zum Aufbau:
Als erstes sollte alle Gewinde geschnitten werden. Das sind vier M3 Gewinde für die Befestigung des Controller Deckels und drei M2 Gewinde für die Befestigung der IMU Abdeckung. Die Kabel des Schleifringes und der IMU müssen mit Kupfertape umwickelt werden.
Anhang anzeigen 102399
Danach kann Yaw Motor angebracht und der Stecker für die Spannungsversorgung und die RC-Signale eingeklebt werden.
Anhang anzeigen 102411
Anschließend wird der Controller und der Schleifring verbaut.
Anhang anzeigen 102408 Anhang anzeigen 102409
Danach werden die Kabel des Schleifrings durch den Yaw-Roll Arm geführt und der Arm kann angeschraubt werden und der Roll Motor wird mit dem Schleifring verlötet.
Anhang anzeigen 102407 Anhang anzeigen 102406
Jetzt wird der Roll-Nick Arm angeschraubt.
Anhang anzeigen 102405
Anschließend muss die GoPro Aufnahme vorbereitet werden. Dazu müssen von dem Mini USB Stecker zwei Teile abgeschnitten werden. Anschließend kann dieser mit Sekundenkleber eingeklebt werden. Dies lässt sich am besten realisieren, indem man den Stecker in die GoPro steckt und ihn mithilfe der GoPro fixiert. Dann muss noch die IMU mit einem Tropfen Sekundenkleber eingeklebt werden.
Anhang anzeigen 102412 Anhang anzeigen 102404
Anhang anzeigen 102410 Anhang anzeigen 102401
Danach werden die IMU und die Video Leitungen mit dem Schleifring verlötet und die Lötstellen werden anschließend mit Kupfertape umwickelt.
Anhang anzeigen 102403 Anhang anzeigen 102402
Zum Schluss muss nur noch der Roll Motor verlötet werden und die Aufnahme kann angeschraubt werden.
Anhang anzeigen 102400
Gruß
Daniel
Gedruckt wird das ganze per SLS Verfahren bei shapeways.
Die IMU und der LiveOut USB Stecker werden in die GoPro Aufnahme integriert.
Die STL Dateien könnt ihr euch bei Thingiverse genauer anschauen und bei Bedarf runterladen.
Hie findet ihr noch ein 3D Rendering des Gimbals(vielen Dank an hexacopter dafür):
3D Rendering
Die maximale Betriebsspannung ist 12V, bei einer höheren Spannung kann es zu I2C Fehlern kommen
Bilder:
Anhang anzeigen 102201 Anhang anzeigen 102166
Videos:
[video=youtube;U1MQhgwNTXE]http://www.youtube.com/watch?v=U1MQhgwNTXE[/video]
[video=youtube;MqzCWpC_oaw]http://www.youtube.com/watch?v=MqzCWpC_oaw#t=165[/video]
Elektronische Komponenten:
Nick-Motor: BGM2208-80 (Goodluckbuy) (foxtechfpv) (Premium-Modellbau)
Roll-Motor: BGM2208-80 (Goodluckbuy) (foxtechfpv) (Premium-Modellbau)
Yaw-Motor: BGM2804 (Goodluckbuy) (RCTimer)
Schleifring: Slipringer 12 pol (Goodluckbuy)
GoPro Live-Out: Tarot TL68A10 (Goodluckbuy)
Controller: STorM32BGC (Gimbal24) (Witespyquad)
3D-Druckteile:
Gesamtes Gimbal (für IMU von Witespyquad)
GoPro Aufnahme (für IMU von Witespyquad)
IMU Abdeckung (für IMU von Witespyquad)
Achtung, mit der hier verwendeten IMU kommt es evtl. zu I2C Fehlern
Gesamtes Gimbal (für IMU von Gimbal24/Motor mit drei Bohrungen)
Gesamtes Gimbal (für IMU von Gimbal24/Motor mit vier Bohrungen)
GoPro Aufnahme (für IMU von Gimbal24/Motor mit drei Bohrung)
GoPro Aufnahme (für IMU von Gimbal24/Motor mit vier Bohrung)
IMU Abdeckung (für IMU von Gimbal24)
Arm Nick-Roll (Für Motor mit drei Bohrungen)
Arm Nick-Roll (Für Motor mit vier Bohrungen)
GoPro Befestigung
Arm Yaw-Roll
Dämpfung
Dämpfung Deckel
Dämpfung Arm
Sonstiges:
Selbstklebende Kupferfolie
M2x6 Linsenkopf (Pitch-Motor)
M2x10 & M2x6 Senkkopf (Roll-Motor/IMU-Abdeckung)
M3x10 & M3x8 & M3x16 Senkkopf (Pitch-Motor/Roll-Motor/Yaw-Motor/Controller Deckel)
M3x10 Linsenkopf (Gopro Befestigung)
M3x8 Distanzbolzen
Hier eine kurze Anleitung zum Aufbau:
Als erstes sollte alle Gewinde geschnitten werden. Das sind vier M3 Gewinde für die Befestigung des Controller Deckels und drei M2 Gewinde für die Befestigung der IMU Abdeckung. Die Kabel des Schleifringes und der IMU müssen mit Kupfertape umwickelt werden.
Anhang anzeigen 102399
Danach kann Yaw Motor angebracht und der Stecker für die Spannungsversorgung und die RC-Signale eingeklebt werden.
Anhang anzeigen 102411
Anschließend wird der Controller und der Schleifring verbaut.
Anhang anzeigen 102408 Anhang anzeigen 102409
Danach werden die Kabel des Schleifrings durch den Yaw-Roll Arm geführt und der Arm kann angeschraubt werden und der Roll Motor wird mit dem Schleifring verlötet.
Anhang anzeigen 102407 Anhang anzeigen 102406
Jetzt wird der Roll-Nick Arm angeschraubt.
Anhang anzeigen 102405
Anschließend muss die GoPro Aufnahme vorbereitet werden. Dazu müssen von dem Mini USB Stecker zwei Teile abgeschnitten werden. Anschließend kann dieser mit Sekundenkleber eingeklebt werden. Dies lässt sich am besten realisieren, indem man den Stecker in die GoPro steckt und ihn mithilfe der GoPro fixiert. Dann muss noch die IMU mit einem Tropfen Sekundenkleber eingeklebt werden.
Anhang anzeigen 102412 Anhang anzeigen 102404
Anhang anzeigen 102410 Anhang anzeigen 102401
Danach werden die IMU und die Video Leitungen mit dem Schleifring verlötet und die Lötstellen werden anschließend mit Kupfertape umwickelt.
Anhang anzeigen 102403 Anhang anzeigen 102402
Zum Schluss muss nur noch der Roll Motor verlötet werden und die Aufnahme kann angeschraubt werden.
Anhang anzeigen 102400
Gruß
Daniel
Zuletzt bearbeitet:
")