So, nun die ersten Erfahrungen:
Was ich zu diesem 3-Achsen Gimbal zusammengetragen habe:
http://www.rcmaster.net/de-fpv-3-axis-brushless-gimbal-w-motor-32-bit-gimbal-kontroller-f%C3%BCr-sony-nex5-6-7-p238236.htm
Verkäufer: rcmaster.net
Preis(2.3.15):206,99 €
Versand: DHL Express (31,36€)+Versicherung(4,99€)
Gesamt:234,34€
Gekauft am 2.3.15, Versendet am 9.3.15, Angekommen am 19.3.15
Zollgebühr:10,99€
Mehrwertsteuer:48,32€
Kapitalprovision von DHL mit Mwst: 11,9€
Gesamt: 71,21€
Insgesamt für alles bezahlt: 305,55€
Äußerer Zustand der Verpackung: Pappkarton an einer Stelle stark eingedrückt.
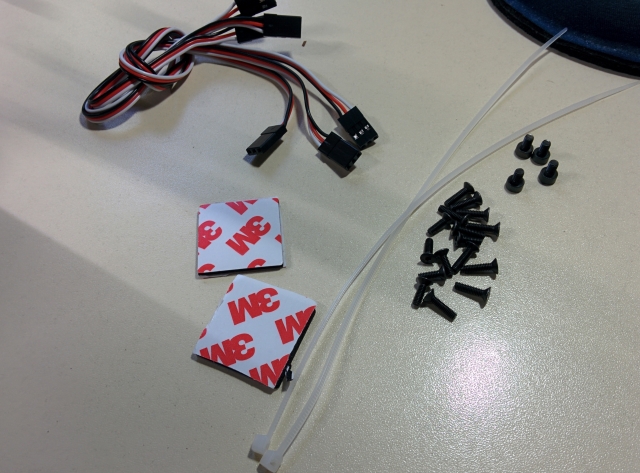
Was war alles drin: Gimbal Ramen, Aufhängeplatte, 12 Dämpfer, alle Schrauben(1-2Ersatz) +Befestigungsschraube für Kamera, 2xKlebeplättchen, 3xVerbindungskabel an RC-Empfänger, Powerkabel
3x "iPOWER GIMBAL BL MOTOR GBM4108H-120T" 24 Pole 22 Magnete (Kabel unterschiedlich lang)
und natürlich "dys Basecam SimpleBGC 32bit" von Basecam Electronics mit 2 IMUs (Cam und Frame) mit Verbindungskabeln ausreichender Länge,
Positiv: Controllerboard und IMUs sind in passenden Plastik Gehäusen
Alle Kabel sind ausreichend lang.
Zusammenbau: Ein wenig Geduld ist von Nöten, aber bis auf 2 Schauben, die ich ersetzt habe (Original wollten nicht so recht passen) ging es ohne Probleme.
Die Kabelführung ist gut realisierbar, aus den Steckern können die einzelnen Pins gelöst werden und man kommt hier ohne löten zurecht.
Da die Sensoren vorher noch kalibriert werden müssen, sollte man das Ganze nur grob zusammenstecken.
Der Kontroller wird mit einem Mini-USB Kabel am PC verbunden.
Den Treiber gibt es hier:
http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx
Das Programm ebenso wie eine Anleitung auf Englisch gibt es hier:
http://www.basecamelectronics.com/downloads/32bit/
Nachdem man die Anleitung gelesen hat, werden die Sensoren kalibriert.
Dann werden diese am Ramen angebracht: Cam IMU unter der Kamera (Hier gibt es eine passende Ausbuchtung, wenn man ein wenig vom Plasikgehäuse abschabt); Frame IMU entweder so wie auf der Internetseite zu sehen, oder an die Dämpferplatte, dann wird auch die Yaw Achse zusätzlich unterstützt
(Im Fallow Yaw Modus sehr zu empfelen)
Dann zum Schluss noch das Powerkabel an eine Verlängerung und den passenden Akkustecker anlöten, dann kann man mit der "Programmierung" beginnen.
Dazu habe ich die Anleitung und folgendes Video benutzt (auch den ersten Teil beachten!):
https://www.youtube.com/watch?v=qB3GqrAQ5OM
Zu den Einstellungen des "Handheld Gimbals" könnte ich jetzt meine Einsellungen posten, doch die bringen euch ja ohne das selbe Setup nichts.
Soviel kann ich sagen: benutzt wird eine Sony A6000 mit SELP1650 Objektiv.
Das Gewicht des Gimbals liegt bei 565g. Als Spannungsquelle benutze ich einen Akkupack von Ravpower und Spannungswandler auf 12V.
Das Haltegestell ist aus Holz und Kupferrohrwinkeln
Ich werde versuchen demnächst ein Testvideo davon zu machen und es hochzuladen.
Bis dahin
#Nemo

")