Hallo,
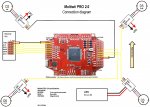
kurz zum Aufbau des Copters, ich besitze einen Copter mit 600mm Spannweite, Multiwii Pro mit GPS (HK - die rote ;-) )
Motoren haben 1100KV ....
nunja, folgendes Problem habe ich derzeit:
Ich würde gerne meinen Jungfernflug machen, leider fängt der Copter sobald er abhebt an zu tanzen bzw bewegt sich ersteinmal in alle Richtungen. Ich habe das zuerst Fehlerhaften PID Werten zugeordnet und diese langsam stetig durchprobiert ob sich etwas ändert. Leider keinen Erfolg. So kam mir die Idee, dass bei der Regelung doch eigentlich der gegenüberliegende Rotor die Unregelmäßigkeit ausgleichen sollte.
Also folgender Versuch:
Props abgebaut und den Copter an zwei gegenüberliegenden Punkten aufgebockt, dann auf etwa 1400 Drehzahl gesteuert und einfach mal bewegt. Ergebnis:
Hinten Links -> Herunter -> Hinten Rechts steuert gegen
Hinten Rechts -> Herunter ->Vorne Rechts steuert gegen
Vorne Rechts -> Herunter -> Vorne Links steuert gegen
Vorne Links -> Herunter -> Hinten Links steuert gegen
Meine Frage: Ist das so richtig?
Im Versuch sind die Rotoren was die Richtungen angeht korrekt....
Von daher würde ich eine falsche Anordnung ausschließen.
kurz zum Aufbau des Copters, ich besitze einen Copter mit 600mm Spannweite, Multiwii Pro mit GPS (HK - die rote ;-) )
Motoren haben 1100KV ....
nunja, folgendes Problem habe ich derzeit:
Ich würde gerne meinen Jungfernflug machen, leider fängt der Copter sobald er abhebt an zu tanzen bzw bewegt sich ersteinmal in alle Richtungen. Ich habe das zuerst Fehlerhaften PID Werten zugeordnet und diese langsam stetig durchprobiert ob sich etwas ändert. Leider keinen Erfolg. So kam mir die Idee, dass bei der Regelung doch eigentlich der gegenüberliegende Rotor die Unregelmäßigkeit ausgleichen sollte.
Also folgender Versuch:
Props abgebaut und den Copter an zwei gegenüberliegenden Punkten aufgebockt, dann auf etwa 1400 Drehzahl gesteuert und einfach mal bewegt. Ergebnis:
Hinten Links -> Herunter -> Hinten Rechts steuert gegen
Hinten Rechts -> Herunter ->Vorne Rechts steuert gegen
Vorne Rechts -> Herunter -> Vorne Links steuert gegen
Vorne Links -> Herunter -> Hinten Links steuert gegen
Meine Frage: Ist das so richtig?
Im Versuch sind die Rotoren was die Richtungen angeht korrekt....
Von daher würde ich eine falsche Anordnung ausschließen.