
Hier nun auch die Vorstellung unserer KISS FC.
wie ja schon zu manchem durch gedrungen ist arbeiten wir seit ner weile an einer eigenen FC mit auch einer eigenen Software. noch diesen Monat ist es dann endlich soweit und es wird sie bei Flyduino.net geben.
Grundidee war es eine FC zu machen die einfach einzustellen ist, aber dennoch einen wirklich gute acro/manual/race mode bietet. bisher gibt es ja meisst einfache schwebe, oder komplexe acro FC's...
Auch der Level mode der KISS FC geht")
Fotos der Boards v1.03 aus der Produktion:


und die Anschlüsse:
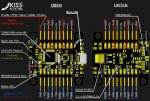
Drauf ist ein STM32F303CCT6 also der 256KB F3. dazu eine MPU6050, ein BEC das bis zu 6S ab kann, und 5V wandler an den PWM ausgängen . Es soll später auch möglich sein cleanflight oder betaflight drauf zu flashen.
In erster Linie läuft natürlich unsere eigene KISS FC Software darauf.
Hier ein Paar Bilder der aktuellen GUI:



Erhältlich bei Flyduino: http://flyduino.net/KISS-FC-32bit-Flight-Controller
Bedienungsanleitung v1.05: https://flyduino.net/ultraesc/downl...htController-Bedienungsanleitung-v1.05-de.pdf
Begleitend zur GUI Version 1.05
GUI (Chrome App, z.Zt. v1.08):https://github.com/fedorcomander/kissfc-chrome-gui/releases
Dort findet Ihr ab sofort immer die neuesten Versionen.
Aktuelle Änderungen:
- Rate Tool integriert
- Ex- und Import vom Setup jetzt lokal speicherbar
"Inoffizielle" Android App für OTG (jeweils letzte Version): https://github.com/fedorcomander/simple-gui/releases/latest
Updateanleitung v1.01: http://ultraesc.de/KISSFC/index.html
Updateanleitung v1.02beta: https://www.flyduino.net/ultraesc/KISSFC/beta_update_de.html
Bedienungsanleitung für das KISS PBD für ESC24A: http://www.flyduino.net/ultraesc/downloads/Flyduino-KISS-PDB-Bedienungsanleitung-v1.0-de.pdf
Anleitung zum Firmware Update / Flashen der KISS FC von Philipp Seidel: http://blog.seidel-philipp.de/kiss-fc-firmware-update-durchfuehren/
Neue Firmware Version KISS FC RC24
Änderungen seit RC16:
RC21
Unter der Haube hat sich einiges getan, speziell bei den Filtern und dem Airmode:
RC22
RC23
RC24
Hinweis zum Update: Konkurrierende Treiber deinstallieren
Falls Ihr bei verbundenenr KISS FC im DfuseDemo Programm kein passendes Gerät findet und Ihr vorher bereits einen alternativen Treiber installiert haben solltet, z.B. ZADIG, dann kann es Konflikte geben, die ein Flaschen der Firmware verhindern. Den alten Treiber müsst Iht deshalb zuerst deinstallieren.
1. Verbindet die KISS FC mit gebrücktem Bootjumper mit dem PC
2. Geht zum Gerätemanager, im Menü oben wählt "Ansicht" aus und lasst Euch "Ausgeblendete Geräte anzeigen".
3. Der alte USB-Treiber sollte sich nun unten in der Liste unter "USB-Geräte" zeigen (nicht USB-Controller)
4. Klickt mit der rechten Maustaste auf den vorherigen STM32Bootloader Treiber und wählt "deinstallieren". Stellt vorher sicher, dass Ihr "alle Dateien entfernen" ausgewählt habt, damit der von ZADIG verbogene Treiber restlos entfernt wird.
5. Danach die KISS FC abstecken und wieder anstecken, immer noch mit geschlossenem Bootjumper
Windows sollte nun ein neues Gerät erkennen und vorschlagen, den Treiber dafür zu installieren. Nach ein paar Minuten sollte der Treiber installiert sein und sowohl im Geräte Manager als auch DfuseDemo in der Liste angezeigt werden.

Der Preis ist 34,90Euro.
Die PID Einstellungen können geteilt werden.
quadmovr und finalglide haben schon ein paar Flugvideos gemacht
z.B: https://www.youtube.com/watch?v=LbuCdn8_QVM
mehr in FGA's Kanal: https://www.youtube.com/user/FinalGlideAus/videos
YouTube Playliste mit Flug- und Demovideos: https://www.youtube.com/playlist?list=PLmCmn3y1eCNiuOqsVImXDUEHZgE4ry5nB
gruß
Felix
wie ja schon zu manchem durch gedrungen ist arbeiten wir seit ner weile an einer eigenen FC mit auch einer eigenen Software. noch diesen Monat ist es dann endlich soweit und es wird sie bei Flyduino.net geben.
Grundidee war es eine FC zu machen die einfach einzustellen ist, aber dennoch einen wirklich gute acro/manual/race mode bietet. bisher gibt es ja meisst einfache schwebe, oder komplexe acro FC's...
Auch der Level mode der KISS FC geht
Fotos der Boards v1.03 aus der Produktion:
und die Anschlüsse:
Drauf ist ein STM32F303CCT6 also der 256KB F3. dazu eine MPU6050, ein BEC das bis zu 6S ab kann, und 5V wandler an den PWM ausgängen . Es soll später auch möglich sein cleanflight oder betaflight drauf zu flashen.
In erster Linie läuft natürlich unsere eigene KISS FC Software darauf.
Hier ein Paar Bilder der aktuellen GUI:
Erhältlich bei Flyduino: http://flyduino.net/KISS-FC-32bit-Flight-Controller
Bedienungsanleitung v1.05: https://flyduino.net/ultraesc/downl...htController-Bedienungsanleitung-v1.05-de.pdf
Begleitend zur GUI Version 1.05
GUI (Chrome App, z.Zt. v1.08):https://github.com/fedorcomander/kissfc-chrome-gui/releases
Dort findet Ihr ab sofort immer die neuesten Versionen.
Aktuelle Änderungen:
- Rate Tool integriert
- Ex- und Import vom Setup jetzt lokal speicherbar
"Inoffizielle" Android App für OTG (jeweils letzte Version): https://github.com/fedorcomander/simple-gui/releases/latest
Updateanleitung v1.01: http://ultraesc.de/KISSFC/index.html
Updateanleitung v1.02beta: https://www.flyduino.net/ultraesc/KISSFC/beta_update_de.html
Bedienungsanleitung für das KISS PBD für ESC24A: http://www.flyduino.net/ultraesc/downloads/Flyduino-KISS-PDB-Bedienungsanleitung-v1.0-de.pdf
Anleitung zum Firmware Update / Flashen der KISS FC von Philipp Seidel: http://blog.seidel-philipp.de/kiss-fc-firmware-update-durchfuehren/
Neue Firmware Version KISS FC RC24
Änderungen seit RC16:
RC21
Unter der Haube hat sich einiges getan, speziell bei den Filtern und dem Airmode:
- RC21 hat ein komplett neues LPF (über die GUI konfigurierbar)
- Diese Version behebt auch einen 3D-Modus Bug, womit normales Fliegen (ohne 3D-swich an, aber 3d in der GUI aktiviert) fast unmöglich war.
- Die USB-Interrupts werden nach dem Armen deaktiviert, solange kein USB angeschlossen ist (dies könnte einige "Aus-dem-Himmel-Fallen" Probleme beheben) und die blaue LED blinkt nun 1 Mal je Sekunde, wenn die MCU einen harten Fehler zeigt, was aber nur selten der Fall ist.
- Ein Fehler wurde behoben, wo der FC manchmal einfriert, wenn die LPF-Einstellung in der GUI geändert wurde.
- Mehr erweiterte Filter hinzugefügt, einer für jeden I und D-Term separat, um Motor / Rahmen-Vibrationen ohne Nachteile herauszufiltern.
- Das Verhalten ähnlich Betaflight beim Armen wurde für Airmode hinzugefügt. Dadurch drehen die Motoren erst hoch, wenn eine Eingabe über Pitch- oder Rollstick erfolgte.
RC22
- Level Mode gefixt
- Das Hochstarten der Motoren nach dem Armen sollte nun besser funktionieren. Mehr Stickinput nötig, bevor I aktiv wird
- Dynamischer D Filter (sollte Oszillazionen um den Throttle Mittelpunkt reduzieren)
- Viele JETI Telemetrieoptionen hinzu gefügt
RC23
- Jeti Bug gefixt
- Filterung leicht reduziert
RC24
- Telemetrie funzt wieder
Hinweis zum Update: Konkurrierende Treiber deinstallieren
Falls Ihr bei verbundenenr KISS FC im DfuseDemo Programm kein passendes Gerät findet und Ihr vorher bereits einen alternativen Treiber installiert haben solltet, z.B. ZADIG, dann kann es Konflikte geben, die ein Flaschen der Firmware verhindern. Den alten Treiber müsst Iht deshalb zuerst deinstallieren.
1. Verbindet die KISS FC mit gebrücktem Bootjumper mit dem PC
2. Geht zum Gerätemanager, im Menü oben wählt "Ansicht" aus und lasst Euch "Ausgeblendete Geräte anzeigen".
3. Der alte USB-Treiber sollte sich nun unten in der Liste unter "USB-Geräte" zeigen (nicht USB-Controller)
4. Klickt mit der rechten Maustaste auf den vorherigen STM32Bootloader Treiber und wählt "deinstallieren". Stellt vorher sicher, dass Ihr "alle Dateien entfernen" ausgewählt habt, damit der von ZADIG verbogene Treiber restlos entfernt wird.
5. Danach die KISS FC abstecken und wieder anstecken, immer noch mit geschlossenem Bootjumper
Windows sollte nun ein neues Gerät erkennen und vorschlagen, den Treiber dafür zu installieren. Nach ein paar Minuten sollte der Treiber installiert sein und sowohl im Geräte Manager als auch DfuseDemo in der Liste angezeigt werden.
Der Preis ist 34,90Euro.
Die PID Einstellungen können geteilt werden.
quadmovr und finalglide haben schon ein paar Flugvideos gemacht
z.B: https://www.youtube.com/watch?v=LbuCdn8_QVM
mehr in FGA's Kanal: https://www.youtube.com/user/FinalGlideAus/videos
YouTube Playliste mit Flug- und Demovideos: https://www.youtube.com/playlist?list=PLmCmn3y1eCNiuOqsVImXDUEHZgE4ry5nB
gruß
Felix
Zuletzt bearbeitet:

