
Hallo an Alle,
in diesem Thread möchte ich meinen nächsten Kopter vorstellen. Ich entschied mich für eine klappbare Rahmenausführung, da diese einen relativ geringen Transportmaß und dennoch ausreichen großen Motorenabstand bietet.
Die Grundausstattung:

Direkt unterhalb des PDB fanden 2 ECS-Regler deren Platz. Für die „zweite Ebene“ verwendete ich die Abstandshalter aus Nylon. Hierbei sind nur die vorderen beiden Abstandshalter mit dem Rahmen verbunden, die Hintere legen nur auf. Auf dem nachfolgenden Bild ist ebenfalls eine Storm32 Gimbal-Steuerung zu sehen.

Beim Flugcontrollerwahl entschied ich für Pixhawk Lite aufgrund seiner kompakten Größe und niedrigen Preises. Hierbei gilt einiges zu beachten, da die sämtliche RX/TX-Anschlüsse stark zusammengefasst sind. Konkret verfügt Pixhawk (ORIGINAL) über jeweils einen 6-poligen Stecker-Anschluss für Telemetrie 1, Telemetrie 2, GPS und SERIAL. Diese Anschlüsse sind beim Pixhawk Lite innerhalb zwei 6-polligen Stecker kombiniert.

Also muss die Kabelbelegung ebenfalls angepasst werden. Hierbei müssen die beide äußere Kabeln (5V und GND) entsprechen gesplittet werden. Bei den RX- und TX-Kabeln reicht das Umzustecken meisten aus. In meinem Fall verwende ich den GPS2/TELEM2-Anschluss einmal für den STORM32 Gimbal-Kontroller (dazu später mehr) und einmal für die Telemetrieübertragung (sowie OSD-Anzeige mittels Y-TX-Kabel und nicht belegten RX-Kabel). Ublox Neo8 hängt am GPS1-Anschluss, somit ist ein RX-/TX-Anschluss vorsichtshalber für die Zukunft frei.
Das Kunststoffgehäuse des Pixhawk Lite empfand ich als überflüssig. So platzierte ich die Flugsteuerung auf einer ungenützte Dämpfungsplatte aus einem älteren Projekt.

Für die Aufnahme der Dämpfungsplatte waren 4 Bohrungen in der Rahmenmitte notwendig. Hierbei wählte ich ein etwas größeren Abstand zwischen den Bohrungen als auf der Dämpfungsplatte, damit die Dämpfer leicht vorgespannt sind. Aufgrund des geringen Gewichtes war die erforderliche Dämpfungseigenschaft noch nicht gegeben. Das lasst sich mittels Gehörschutzstöpseln beheben. Diese müssten in meinem Fall vorher halbiert werden. Das Einführen ist zugegebener Maßen etwas mühselig.

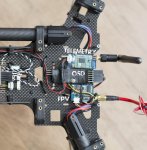
Im hinteren Bereich wurde ein 3DR Radio 433Mhz-Telemetrie-Modul, ein MinimOSD-Board und ein Skyzone TS5813S FPV-Sender mit einer alternative Antenne nebeneinander platziert.
Das PDB hatte von Anfang an so ein komisches Fiepen, weshalb diese ausgetauscht werden musste (zum Glück konnte in der Nachbarschaft die Ersatzteile schnell besorgen).
Die oberste Ebene sollte möglichst clean ausgeführt werden. Die beide obere Standard-Plattformen wurden erst gar nicht aufgebaut. Stattdessen benutzte ich den klappbaren GPS-Turm für Ublox NEO-M8N GPS/Kompass-Modul. Hierfür verwendete ich zwei bestehende Bohrung, die ein wenig ausgeweitet werden mussten.

Der Flugkontroller berührte ein wenig die Deckplatte, so wurde ein Stück von der Platte teilweise weggedremmelt. Dieses Stück feilte zu recht, isolierte von unten und montierte diese Plattform, so dass der Fernsteuerungsempfänger (Radiolink R9D) auf den FC befestigt werden könnte. *Eine abfalllose Fertigung

Nebenbei beseitigte ich provisorisch das herrschende Kabel-Chaos und fand endlich einen geeigneten Platz für den Pixhawk Safety Switch. Danach war ich ziemlich neugierig, wie der Kopter sich in der Luft verhält so verschraubte ich die obere Platte und musste mich erstmal wundern, wie stabil es auf einmal wurde.

UPDATE1:
Inzwischen führte ich die sämtlichen Kalibrierungen im Mission Planer aus, montierte die Propeller, erwischte ein gutes Wetter und...
[video=youtube_share;o7A8nFrp5S8]https://youtu.be/o7A8nFrp5S8[/video]
Ein absolut unspektakuläres Video, aber es ist ein echt eigenartiges gemischtes Gefühl, wenn der Kopter zum ersten Mal abhebt
So, weiter geht es mit dem Umbau. Ursprünglich plante ich eigentlich die speziellen Motorausleger sowie gekürzte klappbare Landebeine zu fertigen. Die bevorstehende Neuerung des Luftverkehrsgesetzes zwingt mich aber eher unterhalb der 2 Kilogramm-Grenze zu bleiben, daher werde ich mich erst später darüber entscheiden. Vorher beschloss ich die originalen Landebeine einfach entlang der gekennzeichneten Stellen zu kürzen, da ich mit der Optik nicht wirklich anfreunden konnte.

Die Platten wurden wie folgt befestigt, so könnte ich an der oberen Kante sauberen Schnitt realisieren. Anschließend wurden die Platten miteinander verschraubt und gefeilt.

Die originalen Landebeine waren jeweils 24 Gramm inklusive alle Befestigungsschrauben. Die Kürzung brachte also insgesamt 56 Gramm Gewichtsersparnis.


Zum Schluss noch zwei weitere Bilder im zusammengefalteten Zustand.


Was weiterhin geplant ist:
in diesem Thread möchte ich meinen nächsten Kopter vorstellen. Ich entschied mich für eine klappbare Rahmenausführung, da diese einen relativ geringen Transportmaß und dennoch ausreichen großen Motorenabstand bietet.
Die Grundausstattung:
- Rahmen: Alien 560
- Motoren: DYS D4215 650KV
- ESC-Regler: ESC DYS SN30A Mini 30A SimonK
- Flugkontroller: PX4 Pixhawk Lite
- Propeller: RC-Timer 12x4
- Batterie: Multistar 4S 10C 8000mAh
- Fernsteuerung: Radiolink AT9
Direkt unterhalb des PDB fanden 2 ECS-Regler deren Platz. Für die „zweite Ebene“ verwendete ich die Abstandshalter aus Nylon. Hierbei sind nur die vorderen beiden Abstandshalter mit dem Rahmen verbunden, die Hintere legen nur auf. Auf dem nachfolgenden Bild ist ebenfalls eine Storm32 Gimbal-Steuerung zu sehen.
Beim Flugcontrollerwahl entschied ich für Pixhawk Lite aufgrund seiner kompakten Größe und niedrigen Preises. Hierbei gilt einiges zu beachten, da die sämtliche RX/TX-Anschlüsse stark zusammengefasst sind. Konkret verfügt Pixhawk (ORIGINAL) über jeweils einen 6-poligen Stecker-Anschluss für Telemetrie 1, Telemetrie 2, GPS und SERIAL. Diese Anschlüsse sind beim Pixhawk Lite innerhalb zwei 6-polligen Stecker kombiniert.
Also muss die Kabelbelegung ebenfalls angepasst werden. Hierbei müssen die beide äußere Kabeln (5V und GND) entsprechen gesplittet werden. Bei den RX- und TX-Kabeln reicht das Umzustecken meisten aus. In meinem Fall verwende ich den GPS2/TELEM2-Anschluss einmal für den STORM32 Gimbal-Kontroller (dazu später mehr) und einmal für die Telemetrieübertragung (sowie OSD-Anzeige mittels Y-TX-Kabel und nicht belegten RX-Kabel). Ublox Neo8 hängt am GPS1-Anschluss, somit ist ein RX-/TX-Anschluss vorsichtshalber für die Zukunft frei.
Das Kunststoffgehäuse des Pixhawk Lite empfand ich als überflüssig. So platzierte ich die Flugsteuerung auf einer ungenützte Dämpfungsplatte aus einem älteren Projekt.
Für die Aufnahme der Dämpfungsplatte waren 4 Bohrungen in der Rahmenmitte notwendig. Hierbei wählte ich ein etwas größeren Abstand zwischen den Bohrungen als auf der Dämpfungsplatte, damit die Dämpfer leicht vorgespannt sind. Aufgrund des geringen Gewichtes war die erforderliche Dämpfungseigenschaft noch nicht gegeben. Das lasst sich mittels Gehörschutzstöpseln beheben. Diese müssten in meinem Fall vorher halbiert werden. Das Einführen ist zugegebener Maßen etwas mühselig.
Im hinteren Bereich wurde ein 3DR Radio 433Mhz-Telemetrie-Modul, ein MinimOSD-Board und ein Skyzone TS5813S FPV-Sender mit einer alternative Antenne nebeneinander platziert.
Das PDB hatte von Anfang an so ein komisches Fiepen, weshalb diese ausgetauscht werden musste (zum Glück konnte in der Nachbarschaft die Ersatzteile schnell besorgen).
Die oberste Ebene sollte möglichst clean ausgeführt werden. Die beide obere Standard-Plattformen wurden erst gar nicht aufgebaut. Stattdessen benutzte ich den klappbaren GPS-Turm für Ublox NEO-M8N GPS/Kompass-Modul. Hierfür verwendete ich zwei bestehende Bohrung, die ein wenig ausgeweitet werden mussten.
Der Flugkontroller berührte ein wenig die Deckplatte, so wurde ein Stück von der Platte teilweise weggedremmelt. Dieses Stück feilte zu recht, isolierte von unten und montierte diese Plattform, so dass der Fernsteuerungsempfänger (Radiolink R9D) auf den FC befestigt werden könnte. *Eine abfalllose Fertigung
Nebenbei beseitigte ich provisorisch das herrschende Kabel-Chaos und fand endlich einen geeigneten Platz für den Pixhawk Safety Switch. Danach war ich ziemlich neugierig, wie der Kopter sich in der Luft verhält so verschraubte ich die obere Platte und musste mich erstmal wundern, wie stabil es auf einmal wurde.
UPDATE1:
Inzwischen führte ich die sämtlichen Kalibrierungen im Mission Planer aus, montierte die Propeller, erwischte ein gutes Wetter und...
[video=youtube_share;o7A8nFrp5S8]https://youtu.be/o7A8nFrp5S8[/video]
Ein absolut unspektakuläres Video, aber es ist ein echt eigenartiges gemischtes Gefühl, wenn der Kopter zum ersten Mal abhebt
So, weiter geht es mit dem Umbau. Ursprünglich plante ich eigentlich die speziellen Motorausleger sowie gekürzte klappbare Landebeine zu fertigen. Die bevorstehende Neuerung des Luftverkehrsgesetzes zwingt mich aber eher unterhalb der 2 Kilogramm-Grenze zu bleiben, daher werde ich mich erst später darüber entscheiden. Vorher beschloss ich die originalen Landebeine einfach entlang der gekennzeichneten Stellen zu kürzen, da ich mit der Optik nicht wirklich anfreunden konnte.
Die Platten wurden wie folgt befestigt, so könnte ich an der oberen Kante sauberen Schnitt realisieren. Anschließend wurden die Platten miteinander verschraubt und gefeilt.
Die originalen Landebeine waren jeweils 24 Gramm inklusive alle Befestigungsschrauben. Die Kürzung brachte also insgesamt 56 Gramm Gewichtsersparnis.
Zum Schluss noch zwei weitere Bilder im zusammengefalteten Zustand.
Was weiterhin geplant ist:
- Den Kopter erstmal in die Lüft bringen ✔
- Landebeine kürzen ✔
- DIY Gimbal zeichnen | fertigen | montieren
- Beleuchtung anbringen
- Batteriehalterung entfernen/ ersetzen
- Motorausleger
- Klappbare Landebeine
- Rahmen in der Mitte verstärken /oben eine Abdeckung fräsen
- Transportkoffer-/Tasche finden
Zuletzt bearbeitet:

