
WING Kleinster denkbarer FC (für einen FixedWing)
- Themenstarter kmpec
- Beginndatum
Moin!
Ich habe das Problem gefunden...
Ich habe das GPS wie in der Anleitung beschrieben angelötet. Offenbar reichen die 4,5V auf dem Lötpad nicht aus. VCC auf einem 5V Lötpad angeschlossen (erfordert Batteriespannung - nicht nur USB) und schon funktioniert es. Damit habe ich nicht gerechnet. Auf den Matek-Boards oder bei SpeedyBees reichen die 4V5 immer aus. Zumal die LED am GPS ja auch leuchtete.
Naja - Fehler gefunden und behoben.
Nun mache ich mich mal an den Einbau")
Gruß
David
Ich habe das Problem gefunden...
Ich habe das GPS wie in der Anleitung beschrieben angelötet. Offenbar reichen die 4,5V auf dem Lötpad nicht aus. VCC auf einem 5V Lötpad angeschlossen (erfordert Batteriespannung - nicht nur USB) und schon funktioniert es. Damit habe ich nicht gerechnet. Auf den Matek-Boards oder bei SpeedyBees reichen die 4V5 immer aus. Zumal die LED am GPS ja auch leuchtete.
Naja - Fehler gefunden und behoben.
Nun mache ich mich mal an den Einbau
Gruß
David
Update:
Ich habe den Einbau begonnen und denke eine recht gute Lösung gefunden zu haben.
Ich habe einen Motorspant gedruckt (FDM - den ersetze ich vermutlich noch gegen einen DLP-Druck ABS-Like) auf dem ich den FC zusammen mit dem ESC (ein Tekko 45A) als sandwich in den Rumpf schieben kann.
Der Spant wird einfach mit Klebeband an der Rumpfröhre befestigt.
So ist der FC einfach zugänglich falls ich mal per USB dran will.
Das GPS wird mit etwas Schrumpfschlauch auf dem Rumpf befestigt. Tape ginge auch.
Die Antennen des RX habe ich seitlich aus dem Heck geführt. Ich denke das sollte funktionieren.
Eine Steckverbindung zum RX werde ich noch einbauen.
Weiter fehlt noch das Höhenruder-Servo und ein geeigneter Akku.
Da ich (ohne Höhenruder-Servo) schon bei 200g bin wird es wohl nichts mit dem 250g Ziel :-(
4Zellen mit 550mAh sollten es schon sein.
Ein geeigneter Name fehlt noch. Ich denke an Maverick (MAV= Micro Arial Vehicle)
Hier mal ein paar Bilder:





Was sagt ihr?
Gruß
David
Ich habe den Einbau begonnen und denke eine recht gute Lösung gefunden zu haben.
Ich habe einen Motorspant gedruckt (FDM - den ersetze ich vermutlich noch gegen einen DLP-Druck ABS-Like) auf dem ich den FC zusammen mit dem ESC (ein Tekko 45A) als sandwich in den Rumpf schieben kann.
Der Spant wird einfach mit Klebeband an der Rumpfröhre befestigt.
So ist der FC einfach zugänglich falls ich mal per USB dran will.
Das GPS wird mit etwas Schrumpfschlauch auf dem Rumpf befestigt. Tape ginge auch.
Die Antennen des RX habe ich seitlich aus dem Heck geführt. Ich denke das sollte funktionieren.
Eine Steckverbindung zum RX werde ich noch einbauen.
Weiter fehlt noch das Höhenruder-Servo und ein geeigneter Akku.
Da ich (ohne Höhenruder-Servo) schon bei 200g bin wird es wohl nichts mit dem 250g Ziel :-(
4Zellen mit 550mAh sollten es schon sein.
Ein geeigneter Name fehlt noch. Ich denke an Maverick (MAV= Micro Arial Vehicle)
Hier mal ein paar Bilder:
Was sagt ihr?
Gruß
David
So, ein letztes Update vor dem erwarteten Flugbericht
Leider zieht hier ein Sturmtief durch, sonst wäre es heute soweit gewesen. Am Donnerstag ist die nächste Chance.
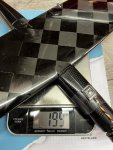
Ich habe nun das Setup fertig. Es ist ein Dreizeller mit 0,85 Ah verbaut. Der F80 mit einer 4,7x4,7" zieht ~35A bei Vollgas. Bei Halbgas wiegt er schon nix mehr (senkrecht gehalten). Ich denke damit sollte die Flugzeit nicht all zu kurz sein. In dieser Konfiguration wiegt er allerdings stolze 290g - also das Ziel WEIT verfehlt! Was sehr schade ist, denn mit SORA 2.5 sieht es so aus als wäre <250g einfach alles erlaubt Aber dafür muss ich dann wohl doch wieder an Schaum gehen.
Oder Motor und Akku nochmal deutlich verkleinern und auf zwei Zellen gehen oder so - könnte gehen. Mal sehen wie er fliegt.
Ich hoffe am Donnerstag dann mehr sagen zu können.

Gruß
David
Leider zieht hier ein Sturmtief durch, sonst wäre es heute soweit gewesen. Am Donnerstag ist die nächste Chance.
Ich habe nun das Setup fertig. Es ist ein Dreizeller mit 0,85 Ah verbaut. Der F80 mit einer 4,7x4,7" zieht ~35A bei Vollgas. Bei Halbgas wiegt er schon nix mehr (senkrecht gehalten). Ich denke damit sollte die Flugzeit nicht all zu kurz sein. In dieser Konfiguration wiegt er allerdings stolze 290g - also das Ziel WEIT verfehlt! Was sehr schade ist, denn mit SORA 2.5 sieht es so aus als wäre <250g einfach alles erlaubt
Aber dafür muss ich dann wohl doch wieder an Schaum gehen.Oder Motor und Akku nochmal deutlich verkleinern und auf zwei Zellen gehen oder so - könnte gehen. Mal sehen wie er fliegt.
Ich hoffe am Donnerstag dann mehr sagen zu können.
Gruß
David
Nur, weil es interessiert und Elyot oben auch schon fragte: Warum baut mal da eine FC (und erst recht) ein?? Normalerweise für für Leute, die nicht fliegen können oder wollen. Beides komisch bei so einem Modell.
Ich fliege seit fast 30 Jahren Modellflugzeuge von Hangseglern über Helis zu Jets. Seit ein paar Jahren mache ich das mit den "drohnen" (ich meine nicht eure Multikopter) beruflich - in der Forschung. Da hat es mich einfach gereizt den kleinen schnellen Flieger, den ich auch schon als reinen RC-Flieger hatte, mit einem FC zu versehen und aus zu tunen. Ich habe einfach Spaß an der Technik, baue und programmiere gerne und will sehen was das mit sich bringt. Ohne ein konkretes Ziel. Hobby* halt. Wo ist denn das Problem? Die Frage nach dem Sinn stellt ich mir überhaupt nicht. Auch nicht bei Leuten die den 40sten 4" Multikopter mit Kamera basteln um damit im Kreis zu fliegen
Hobby* - jeder wie er mag.
Gruß
David
* in der Freizeit aus Neigung, Freude an der Sache mit einem gewissen Eifer betriebene Beschäftigung auf einem bestimmten Gebiet.
👍
Das ist nachvollziehbar. Hatte ich irgendwann auch und dann die Firma drangegeben. Immer gleich ist öde. Und Drohnen für Forschung zu bauen ist auch nicht mehr so einfach… Jetzt sind die Drohnen „etwas“ größer und komplexer. 😁Hatte es nur so gehaltem, und tue es immer noch so, dass in Pylon Racer und ähnliche Modelle nix kommt, was potentielle Gefahren darstellt. Wie eine FC eben.
Aber ansonsten…
Kann ich verstehen.
Das ist nachvollziehbar. Hatte ich irgendwann auch und dann die Firma drangegeben. Immer gleich ist öde. Und Drohnen für Forschung zu bauen ist auch nicht mehr so einfach… Jetzt sind die Drohnen „etwas“ größer und komplexer. 😁Hatte es nur so gehaltem, und tue es immer noch so, dass in Pylon Racer und ähnliche Modelle nix kommt, was potentielle Gefahren darstellt. Wie eine FC eben.
Aber ansonsten…
Kann ich verstehen.
Vielleicht erwähne ich noch, dass ich den Flieger geschenkt bekommen habe, da der Vorbesitzer beim Versuch die Servos in der Tragfläche zu versenken einfach mal den Holm durchgeschnitten hat
Nachdem ich den repariert hatte, war er plötzlich meiner und lag jetzt ne ganze Weile im Keller.
Den Rest kennt ihr schon.
Ich komme im Übrigen grade vom Flugfeld. Fliegt sich ganz gut!
Weg geworfen im Manual Mode. Im Cruise ist er dann gestiegen, also musste ich etwas tiefe trimmen (6% Weg). Autotrim war aber aktiv, daher kein Problem. Im Acro dann wie auf Schienen. Kein Aufschwingen - TOP.
Hab dann mal in FBWA geschaltet um zu sehen ob die inner loop im default zu aggressiv ist. Kein Schwingen, also kein Problem. Ich habe aber vergessen die default-Werte zu erhöhen und hatte daher nur 45° Bank und 20° Pitch. Aber ich wollte ja nur mal sehen ob es klappt. Hab zu guter Letzt noch mal in Loiter geschaltet um zu sehen, dass ich auch hier vergessen habe den Defaultwert von 60m Radius zu verkleinern. Der Kleine wird verdammt schnell sehr klein. Die gelben Wingtips sind eine gute Wahl!
Landung dann wieder Manual. Dabei gefiel mir das Verhalten vom elevator gar nicht. Kam irgendwie kaum berechenbar und zögerlich und dann plötzlich doch wieder stark. Könnte CG sein oder die Steuerfläche ist etwas zu klein fürs Gesammtgewicht. Die Landung ist aber gut gegangen, so dass ich noch einen zweiten Flug machen konnte. Ich hatte keinen Rechner mit, also nur Manual und Acro.
Zuhause musste ich dann feststellen, dass keine Logs geschrieben wurden
Zumindest nicht auf SD. Auf der Funke hab ich Logs - die aber wenig von Interesse sind.
Naja - beim nächsten mal dann hoffentlich mit Logs! Dann werde ich auch einen Rechner dabei haben und mal ans Tuning der inner loop gehen.
Ich danke euch jedenfalls für die Empfehlung der FC - tut 1A
Gruß
David
Nachdem ich den repariert hatte, war er plötzlich meiner und lag jetzt ne ganze Weile im Keller.
Den Rest kennt ihr schon.
Ich komme im Übrigen grade vom Flugfeld. Fliegt sich ganz gut!
Weg geworfen im Manual Mode. Im Cruise ist er dann gestiegen, also musste ich etwas tiefe trimmen (6% Weg). Autotrim war aber aktiv, daher kein Problem. Im Acro dann wie auf Schienen. Kein Aufschwingen - TOP.
Hab dann mal in FBWA geschaltet um zu sehen ob die inner loop im default zu aggressiv ist. Kein Schwingen, also kein Problem. Ich habe aber vergessen die default-Werte zu erhöhen und hatte daher nur 45° Bank und 20° Pitch. Aber ich wollte ja nur mal sehen ob es klappt. Hab zu guter Letzt noch mal in Loiter geschaltet um zu sehen, dass ich auch hier vergessen habe den Defaultwert von 60m Radius zu verkleinern. Der Kleine wird verdammt schnell sehr klein. Die gelben Wingtips sind eine gute Wahl!
Landung dann wieder Manual. Dabei gefiel mir das Verhalten vom elevator gar nicht. Kam irgendwie kaum berechenbar und zögerlich und dann plötzlich doch wieder stark. Könnte CG sein oder die Steuerfläche ist etwas zu klein fürs Gesammtgewicht. Die Landung ist aber gut gegangen, so dass ich noch einen zweiten Flug machen konnte. Ich hatte keinen Rechner mit, also nur Manual und Acro.
Zuhause musste ich dann feststellen, dass keine Logs geschrieben wurden
Zumindest nicht auf SD. Auf der Funke hab ich Logs - die aber wenig von Interesse sind.
Naja - beim nächsten mal dann hoffentlich mit Logs! Dann werde ich auch einen Rechner dabei haben und mal ans Tuning der inner loop gehen.
Ich danke euch jedenfalls für die Empfehlung der FC - tut 1A
Gruß
David
Zuletzt bearbeitet:

