
M4 Vibrationsproblem?
- Themenstarter fseider
- Beginndatum
Die restlichen Fragen kann ich jetzt auch beantworten:
Tritt das auch auf ohne Prop am boden auf? Ja, leichte Zuckungen
Tritt das auch mit prop, und am Boden richtig festgehalten auf? Ja
Tritt das auch bei Halb-Gas auf? Ja
Das Ganze läuft irgendwie unsauber. Immer wieder kleine Aussetzer und manchmal Peaks...
Ich habe jetzt mal die Motoren getestet, indem ich sie nur am Empfänger angeschlossen habe. Da laufen sie ganz sauber, ohne Aussetzer.
Ich werde jetzt mal auf das neue Exp. Board N4 umbauen. Vielleicht sind dann die Störungen ja weg.
Danke trotzdem!
Falls die Störungen dann immer noch da sind, melde ich mich wieder. Falls sie weg sind auch ;-)
Gruß Frank
Tritt das auch auf ohne Prop am boden auf? Ja, leichte Zuckungen
Tritt das auch mit prop, und am Boden richtig festgehalten auf? Ja
Tritt das auch bei Halb-Gas auf? Ja
Das Ganze läuft irgendwie unsauber. Immer wieder kleine Aussetzer und manchmal Peaks...
Ich habe jetzt mal die Motoren getestet, indem ich sie nur am Empfänger angeschlossen habe. Da laufen sie ganz sauber, ohne Aussetzer.
Ich werde jetzt mal auf das neue Exp. Board N4 umbauen. Vielleicht sind dann die Störungen ja weg.
Danke trotzdem!
Falls die Störungen dann immer noch da sind, melde ich mich wieder. Falls sie weg sind auch ;-)
Gruß Frank
So, da bin ich (leider) wieder. Nachdem ich jetzt alles noch einmal neu aufgebaut habe und das neue Exp. Board nutze, sowie alle Kugellager der Motoren getauscht habe (wegen eventueller Schäden durch kleinere Abstürze) und der Quad immer noch sporadisch zuckt, bin ich mit meinem Latein am Ende. Ich werde morgen noch einmal ein Log aufzeichnen und darüber hinaus die Zuckungen filmen, damit sich jeder ein Bild davon machen kann, und dann würde ich mich freuen, wenn jemand noch eine Idee hat...
Gruß Frank
Gruß Frank
Zuletzt bearbeitet:
So, heute habe ich noch einmal ausführlich getestet und leider gibt es immer noch kleine Zuckungen. Es stört nicht beim Fliegen, aber die Ursache würde ich schon gerne kennen. Ich habe Euch einmal ein Video eingestellt. Man kann die Zuckungen leider nicht sehen, aber sehr gut hören. Darüber hinaus habe ich das Log eingestellt. Dabei kann man gut erkennen, dass es bei den Motoren immer wieder zu kleinen Peaks kommt und das bei allen gleichzeitig.
Anhang anzeigen Quad.avi.zip
Anhang anzeigen 002-AQL.LOG.zip
Anhang anzeigen Quad.avi.zip
Anhang anzeigen 002-AQL.LOG.zip
Hi Sandmen,
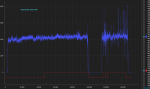
gerade noch einmal ausprobiert und Folgendes festgestellt: Solange ich kein GPS Signal habe treten keine Störungen auf. Egal ob POS oder Manual Mode. Im Log kannst Du das sehr gut erkennen: Bis ca 100000 keine Peaks, da kein GPS Signal vorhanden. Ich bin ab ca. 50000 im ALT Hold Modus unterwegs (GPS Antenne abgedeckt). Dann GPS Abdeckung abgemacht (100000 - 160000) und mit GPS 3d Fix gestartet. Ab da Peaks und unruhiges Fliegen. Schau Dir das Log an: Mot5 und Ch4.Ich werde nachher noch einmal ein kürzeres Log aufzeichnen, damit ich es hier anhängen kann. Die Datei ist selbst nachdem ich sie komprimiert habe zu groß. Deshalb erst einmal nur das Bild...
Gruß Frank
gerade noch einmal ausprobiert und Folgendes festgestellt: Solange ich kein GPS Signal habe treten keine Störungen auf. Egal ob POS oder Manual Mode. Im Log kannst Du das sehr gut erkennen: Bis ca 100000 keine Peaks, da kein GPS Signal vorhanden. Ich bin ab ca. 50000 im ALT Hold Modus unterwegs (GPS Antenne abgedeckt). Dann GPS Abdeckung abgemacht (100000 - 160000) und mit GPS 3d Fix gestartet. Ab da Peaks und unruhiges Fliegen. Schau Dir das Log an: Mot5 und Ch4.Ich werde nachher noch einmal ein kürzeres Log aufzeichnen, damit ich es hier anhängen kann. Die Datei ist selbst nachdem ich sie komprimiert habe zu groß. Deshalb erst einmal nur das Bild...
Gruß Frank
Zuletzt bearbeitet:
So, hier nun das Log-File. Ich konnte das Ganze reproduzieren.
von 0 - 14000: GPS mit CFK abgedeckt, manueller Mode -> Keine Störungen
14000 - 23000: GPS mit CFK abgedeckt, PH Mode -> Keine Störungen, hoher Peak bei 22000 ist die Landung
22000 - 45000: Warten auf GPS Fix, bei 45000 blaue Lampe an
45000 - 52000: GPS Fix, manueller Mode -> leichte Störungen
52000 - 60000: GPS Fix, PH Mode -> deutlich merkbare Störungen
60000- 70000: GPS Fix, manueller Mode -> deutlich merkbare Störungen
Also irgend einen Zusammenhang gibt es da mit dem GPS-Empfang...
Anhang anzeigen 005-AQL.LOG.zip
von 0 - 14000: GPS mit CFK abgedeckt, manueller Mode -> Keine Störungen
14000 - 23000: GPS mit CFK abgedeckt, PH Mode -> Keine Störungen, hoher Peak bei 22000 ist die Landung
22000 - 45000: Warten auf GPS Fix, bei 45000 blaue Lampe an
45000 - 52000: GPS Fix, manueller Mode -> leichte Störungen
52000 - 60000: GPS Fix, PH Mode -> deutlich merkbare Störungen
60000- 70000: GPS Fix, manueller Mode -> deutlich merkbare Störungen
Also irgend einen Zusammenhang gibt es da mit dem GPS-Empfang...
Anhang anzeigen 005-AQL.LOG.zip
Hier das Ergebnis mit Pos Hold auf Standard. Leider hat das nichts gebracht. Ich bin nur mit GPS Signal geflogen, außer in den ersten Sekunden. Was mir noch aufgefallen ist, dass es am Anfang nicht ganz so schlimm mit den Zuckungen ist. Zum Beweis habe ich auch noch ein LOG danach aufgezeichnet mit abgedecktem GPS.
Was meinst Du mit Spannung? Ich nutze einen 4s Akku. Der M4 wird mittels N4 Exp. Board versorgt. Die Akkus waren dieses Mal nicht voll, hatten aber genug Saft (15,6V bei dem Flug mit GPS und 15,3V ohne GPS).
In den Flügen davor waren sie voll.
Beim File ohne GPS ist die Landung für den Peak am Schluss verantwortlich.
Anhang anzeigen MitGPS-AQL.LOG.zip
Anhang anzeigen OhneGPS-AQL.LOG.zip
Anhang anzeigen PARAMS.txt
Was meinst Du mit Spannung? Ich nutze einen 4s Akku. Der M4 wird mittels N4 Exp. Board versorgt. Die Akkus waren dieses Mal nicht voll, hatten aber genug Saft (15,6V bei dem Flug mit GPS und 15,3V ohne GPS).
In den Flügen davor waren sie voll.
Beim File ohne GPS ist die Landung für den Peak am Schluss verantwortlich.
Anhang anzeigen MitGPS-AQL.LOG.zip
Anhang anzeigen OhneGPS-AQL.LOG.zip
Anhang anzeigen PARAMS.txt
Zuletzt bearbeitet:
Ich habe jetzt eine Antwort von Jussi (AQ Forum) bekommen, die ich aber nicht so ganz verstehe.
_________________________________________________
The nature of the UKF means that if you take off without a good heading estimation and no GPS lock, the system will make this behavior as the GPS corrects the heading estimate and the gyro bias. Its perfectly normal, and usually it will go away after a short while (once the UKF has converged on the correct heading), or you can land for a second and take off again.
The solution is to properly calibrate the Magnetometer and wait for a GPS fix before take off.
_________________________________________________
Demnach würde das Verhalten nach einem GPS Fix verschwinden, aber bei mir ist es ja genau anders herum. Oder verstehe ich den Text nicht richtig? Den Kompass habe ich schon kalibriert, kann es aber gerne noch einmal wiederholen.
_________________________________________________
The nature of the UKF means that if you take off without a good heading estimation and no GPS lock, the system will make this behavior as the GPS corrects the heading estimate and the gyro bias. Its perfectly normal, and usually it will go away after a short while (once the UKF has converged on the correct heading), or you can land for a second and take off again.
The solution is to properly calibrate the Magnetometer and wait for a GPS fix before take off.
_________________________________________________
Demnach würde das Verhalten nach einem GPS Fix verschwinden, aber bei mir ist es ja genau anders herum. Oder verstehe ich den Text nicht richtig? Den Kompass habe ich schon kalibriert, kann es aber gerne noch einmal wiederholen.
Ich denke, er meint erst Fix abwarten, dann starten.
So mache ich es draußen auch und es funktioniert.
Was aber dann passiert wenn der Fix im Flug durch Abschattungen weg ist............wahrscheinlich so ein Verhalten wie ich schon mal hatte: Fix kam zurück und M4 jagte wie blöd in die Hecke!
Am besten fliegt mein Ladybird-M4 im Haus ohne GPS-Fix!!
So mache ich es draußen auch und es funktioniert.
Was aber dann passiert wenn der Fix im Flug durch Abschattungen weg ist............wahrscheinlich so ein Verhalten wie ich schon mal hatte: Fix kam zurück und M4 jagte wie blöd in die Hecke!
Am besten fliegt mein Ladybird-M4 im Haus ohne GPS-Fix!!
Das mache ich ja in der Regel auch. Ich habe das jetzt nur zum Testen so gemacht. Es kann ja nicht richtig sein, dass bei GPS Empfang die Motoren unkontrolliert anfangen zu zucken. Das hat der AQ6 auch nicht gemacht, gleiches Frame und gleiche Komponenten. War wohl doch ein Fehler, den gegen einen M4 auszutauschen...
Ich hoffe ja immer noch, dass der Fehler gefunden wird. Vielleicht hat die FC ja auch eine Macke...
Und das Phänomen, was Du beschreibst, dass "er wie blöd in die Hecke jagte", hatte ich auch schon. Sowohl mit dem AQ6 als auch mit dem M4.
So kann ich auf jeden Fall nicht Fliegen und in meinem X8 möchte ich diese FC dann erst recht nicht einbauen.
Ich hoffe ja immer noch, dass der Fehler gefunden wird. Vielleicht hat die FC ja auch eine Macke...
Und das Phänomen, was Du beschreibst, dass "er wie blöd in die Hecke jagte", hatte ich auch schon. Sowohl mit dem AQ6 als auch mit dem M4.
So kann ich auf jeden Fall nicht Fliegen und in meinem X8 möchte ich diese FC dann erst recht nicht einbauen.
Zuletzt bearbeitet:
")

