
Jetzt habe ich erst mal einen Motor getestet EMAX MT 3506-650KV an 15V(mehr gibt mein Netzteil nicht her)

Effizienz g/W - hier musste ich die ersten Werte rauslöschen die waren zu hoch

Schub nach ms
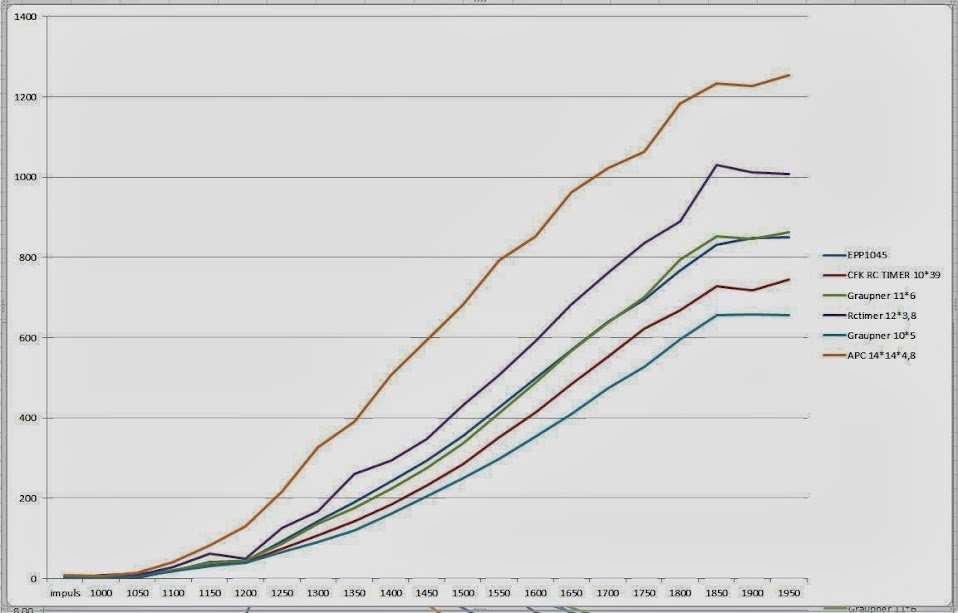
Interessant daß der vermutlich beste weil größe Propeller beim Wirkungsgrad am schlechtesten abgeschnitten hat. Da die x Achse nicht nach Strom sondern nach Impulslänge in ms ist muß man sich aus dem unteren Diagramm zu dem gewünschten Schub die Impulslänge suchen und dann im oberen Diagramm bei der Impulslänge Vergleichen.

Hier mal für 400g Schub
Effizienz g/W - hier musste ich die ersten Werte rauslöschen die waren zu hoch
Schub nach ms
Interessant daß der vermutlich beste weil größe Propeller beim Wirkungsgrad am schlechtesten abgeschnitten hat. Da die x Achse nicht nach Strom sondern nach Impulslänge in ms ist muß man sich aus dem unteren Diagramm zu dem gewünschten Schub die Impulslänge suchen und dann im oberen Diagramm bei der Impulslänge Vergleichen.
Hier mal für 400g Schub
Zuletzt bearbeitet:
") drückt die daumen, dass die escs was können... die hobbywing platinum pro 30a waren mir zu teuer. ..
drückt die daumen, dass die escs was können... die hobbywing platinum pro 30a waren mir zu teuer. ..

