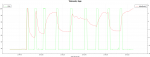
Das energiekompensierte Vario ließ sich erst mit einem RC Glied auf dem Analogausgang des Airspeedsensors zu einem akzeptablem Varioton überreden. Mittlerweile bin ich bei 100nF 100kΩ angekommen. Die Reaktionszeit des Airspeed ist immer noch "sofort", aber die Schwankungen sind deutlich reduziert.
Anhang anzeigen 164237
meine Teile sind jetzt auch alle da. Der R mit 1x10h 5 und der C mit 1x10h -7 haben eine TauZeit von 10msec - also könne man mit C oder R noch grösser gehen oder einen 12 dB Filter machen.
Mal sehen wann ich dazu komme, es zu realisieren, da ich mit anderen Arbeiten gut eingedeckt bin.
Norbert