Hätte auch Interesse an 2-3 Einheiten...
Ich bin kein Experte, aber könnte die Durchkontaktierung für den Antennenanschluss hinter das Lötpad (also um 90° gegen den Uhrzeigersinn relativ zur jetzigen Position) gedreht werden? Wäre es dann möglich ein zweites Massepad neben den Antennenanschluss zu platzieren, damit eine SMA Buchse mechanisch möglichst möglichst robust verlötet werden kann?
Ich bin kein Experte, aber könnte die Durchkontaktierung für den Antennenanschluss hinter das Lötpad (also um 90° gegen den Uhrzeigersinn relativ zur jetzigen Position) gedreht werden? Wäre es dann möglich ein zweites Massepad neben den Antennenanschluss zu platzieren, damit eine SMA Buchse mechanisch möglichst möglichst robust verlötet werden kann?
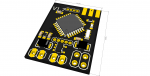
Eagle Datei folgt am Wochenende
") .
.Gruß QuadMax