Freunde der gepflegten Unterhaltung!
Ich bin sehr zufrieden mit meinem LongRange-Schiff von MFD, dem Nimbus 1800. Aufgrund der fetten Batterie brauchen Landungen eine recht große, ebene Fläche. Das schränkt mich in der Wahl der Startpunkte natürlich ein. Hatte schonmal über eine Quadplane Konstruktion nachgedacht, halte das aber aerodynamisch für Käse und extrem hässlich ist es auch. Vom Gewicht mal ganz zu schweigen.
Nun sah ich das hier:
https://www.youtube.com/watch?v=ZIkvESm7Zbw
...und jetzt überlege ich, so etwas ähnliches zu realisieren. Ich habe zwei ziemlich dicke 5208er 360kV Motoren für den Nimbus, die locker 14-16 Zoll drehen können und zusammen 6-10kg Schub schaffen. Zusammen mit einem dritten Motor am Heckrohr sollte das locker gehen. Startgewicht sind aktuell ca 3,8kg, der Flieger ist bis 5kg zugelassen.
Nun folgende Überlegungen (habe keinerlei Erfahrungen mit Quad- bzw Triplanes):
Dimensionierung des Heckmotors
Die beiden Hauptmotoren sitzen ja ziemlich im Schwerpunkt und können locker das gesamte Flugzeug heben. Der Heckmotor hat durch seine Position obendrein einen gewissen Hebelarm. Der sollte also erheblich kleiner dimensioniert werden können. Ideen ? Fliege 6s. Schub vllt so im 1-2kg Bereich mit 14-16er Schraube ? Er bekommt keine Tilt-Mechanik, Yaw wird durch Verkippen der beiden Hauptmotoren realisiert. Kann der wirklich kleiner sein oder habe ich da einen Denkfehler ?
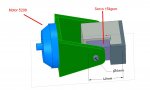
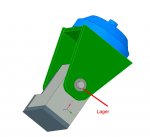
Tilt Mechanik
Habe auf Thingiverse einige Vorlagen für die Mechanik bzw einen Halter gefunden. Würdet Ihr Lager verwenden oder "nur" drucken ? Befürchte, dass ein reiner PLA Halter schnell ausnudelt. Zweite Frage: Was für Servos würdet Ihr verwenden ? Kann mir die Kräfte, die auf die Servos beim Tilten und im Flug durch die Vibrationen wirken nicht so recht vorstellen. Die Motoren wiegen knapp unter 200g/Stück. Ich stelle mir etwas größere Digitalservos vor...oder ? Wenn ja, konkrete Vorschläge für ein Servo ?
Ich bin sehr zufrieden mit meinem LongRange-Schiff von MFD, dem Nimbus 1800. Aufgrund der fetten Batterie brauchen Landungen eine recht große, ebene Fläche. Das schränkt mich in der Wahl der Startpunkte natürlich ein. Hatte schonmal über eine Quadplane Konstruktion nachgedacht, halte das aber aerodynamisch für Käse und extrem hässlich ist es auch. Vom Gewicht mal ganz zu schweigen.
Nun sah ich das hier:
https://www.youtube.com/watch?v=ZIkvESm7Zbw
...und jetzt überlege ich, so etwas ähnliches zu realisieren. Ich habe zwei ziemlich dicke 5208er 360kV Motoren für den Nimbus, die locker 14-16 Zoll drehen können und zusammen 6-10kg Schub schaffen. Zusammen mit einem dritten Motor am Heckrohr sollte das locker gehen. Startgewicht sind aktuell ca 3,8kg, der Flieger ist bis 5kg zugelassen.
Nun folgende Überlegungen (habe keinerlei Erfahrungen mit Quad- bzw Triplanes):
Dimensionierung des Heckmotors
Die beiden Hauptmotoren sitzen ja ziemlich im Schwerpunkt und können locker das gesamte Flugzeug heben. Der Heckmotor hat durch seine Position obendrein einen gewissen Hebelarm. Der sollte also erheblich kleiner dimensioniert werden können. Ideen ? Fliege 6s. Schub vllt so im 1-2kg Bereich mit 14-16er Schraube ? Er bekommt keine Tilt-Mechanik, Yaw wird durch Verkippen der beiden Hauptmotoren realisiert. Kann der wirklich kleiner sein oder habe ich da einen Denkfehler ?
Tilt Mechanik
Habe auf Thingiverse einige Vorlagen für die Mechanik bzw einen Halter gefunden. Würdet Ihr Lager verwenden oder "nur" drucken ? Befürchte, dass ein reiner PLA Halter schnell ausnudelt. Zweite Frage: Was für Servos würdet Ihr verwenden ? Kann mir die Kräfte, die auf die Servos beim Tilten und im Flug durch die Vibrationen wirken nicht so recht vorstellen. Die Motoren wiegen knapp unter 200g/Stück. Ich stelle mir etwas größere Digitalservos vor...oder ? Wenn ja, konkrete Vorschläge für ein Servo ?
 lane. Die aktuelle Version unterstützt neben Quadplanes auch Tiltrotoren, und der Setup mit "Tri mit zwei schwenkbaren Motoren" ist sogar einer der Beispiele in der Dokumentation:
lane. Die aktuelle Version unterstützt neben Quadplanes auch Tiltrotoren, und der Setup mit "Tri mit zwei schwenkbaren Motoren" ist sogar einer der Beispiele in der Dokumentation: