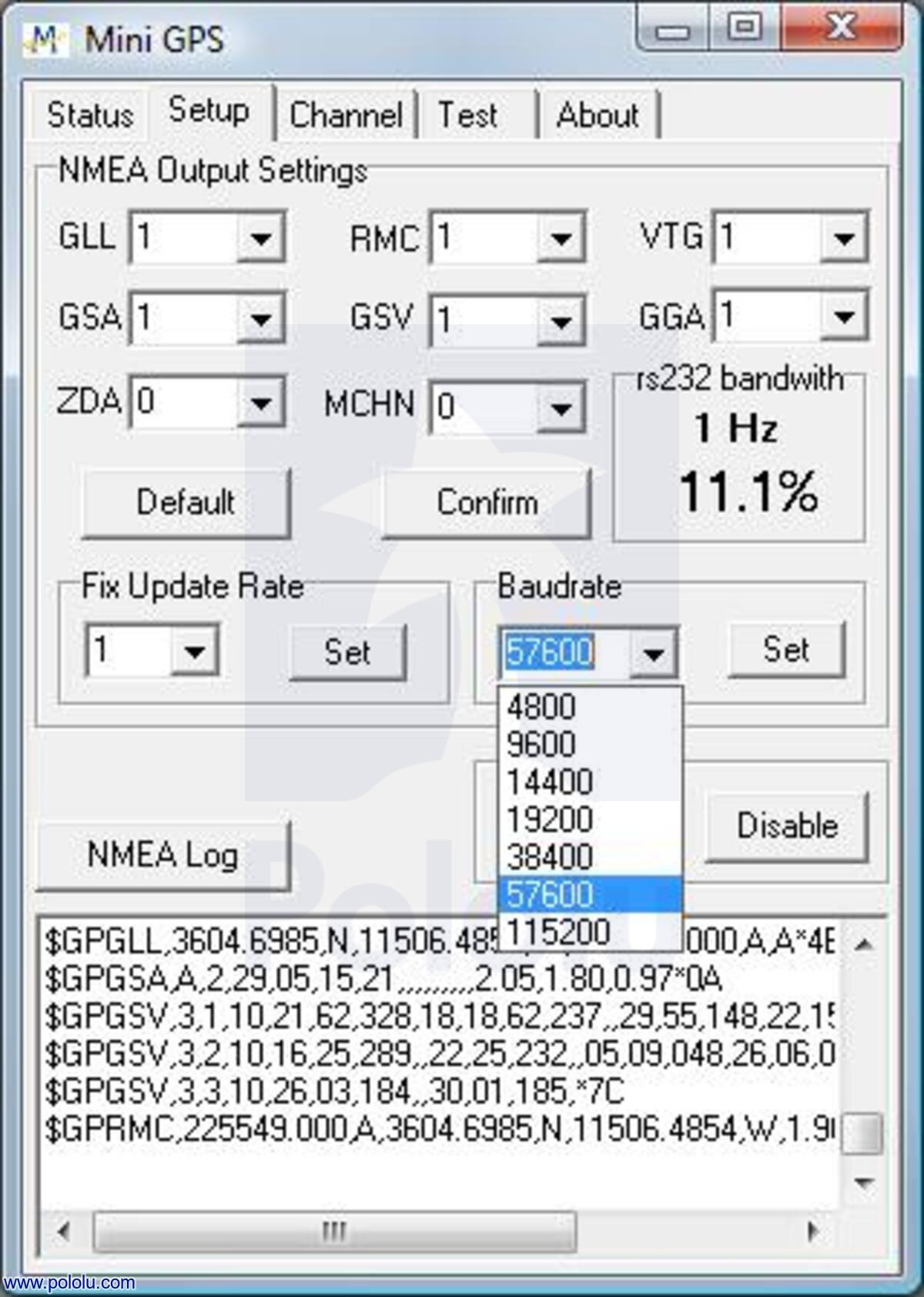
Habe zwischendrin das teil kaputt gespielt gehabt. nu läuft aber wieder alles. 10Hz und 115200 Baud sind wirklich nicht gut, sollte man unbedingt vermeiden, auch wenn das GPS so als standard eingestellt ist.
Mein GPS führt nun TX und RX einmal zum arduino für den Sensor, und zusätzlich habe ich das GPS auch mit dem Flightcontroller verbunden. Beide empfangen die Signale vom GPS. Ergo kann man auch das GPS via Flightcontroller auf die richtige Baudrate einstellen, und das Sensorboard mitlauschen lassen.
Somit kann man auch verhindern, dass man mehrere GPS-Module mitführen muss")
Laut Sketch funktioniert altitude nicht mit Taranis: case 0x10: // Altitude, before "." works on FLD-02, Taranis no
bei distance und speed habe ich ne vermutung, aber ich bin leider nicht so schlau im Code lesen...
Mein GPS führt nun TX und RX einmal zum arduino für den Sensor, und zusätzlich habe ich das GPS auch mit dem Flightcontroller verbunden. Beide empfangen die Signale vom GPS. Ergo kann man auch das GPS via Flightcontroller auf die richtige Baudrate einstellen, und das Sensorboard mitlauschen lassen.
Somit kann man auch verhindern, dass man mehrere GPS-Module mitführen muss
Laut Sketch funktioniert altitude nicht mit Taranis: case 0x10: // Altitude, before "." works on FLD-02, Taranis no
bei distance und speed habe ich ne vermutung, aber ich bin leider nicht so schlau im Code lesen...